-
-
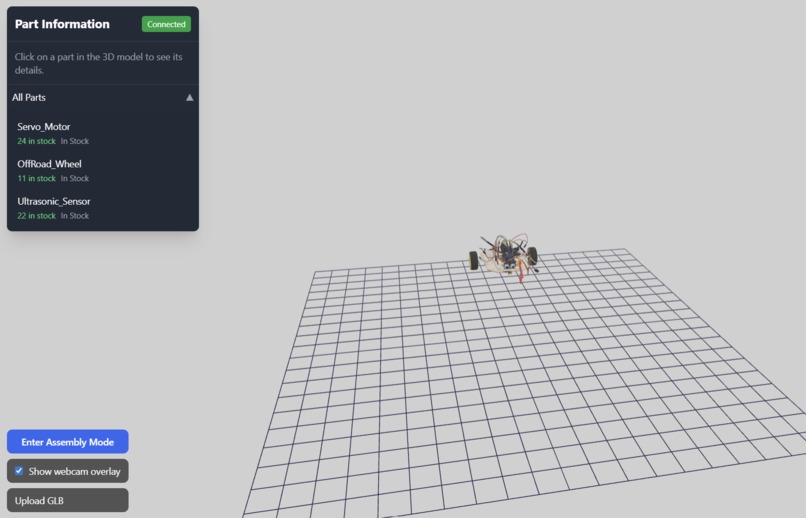
3D Model
-
Picture2
-
Picture4
-
Picture1
-
Picture3





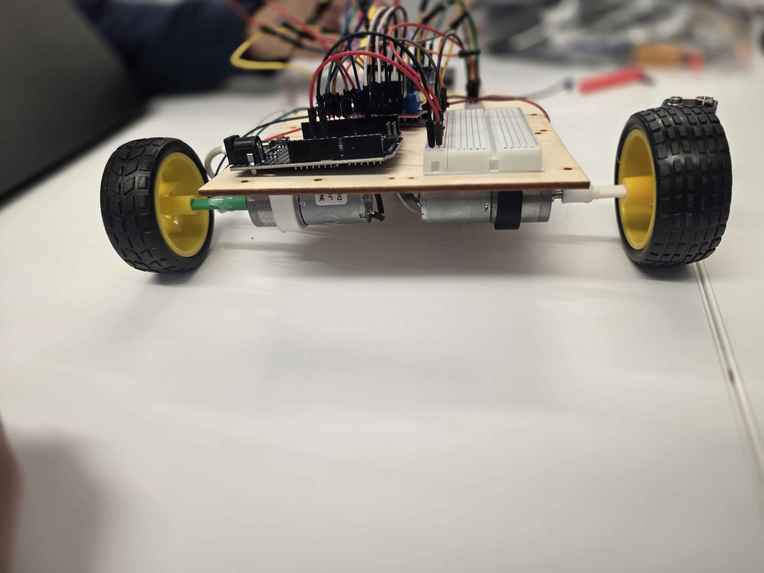
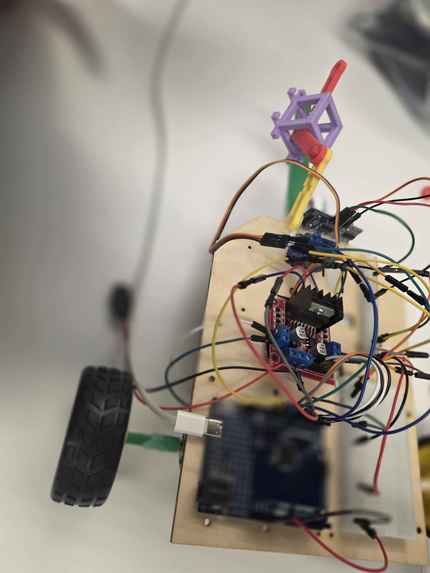
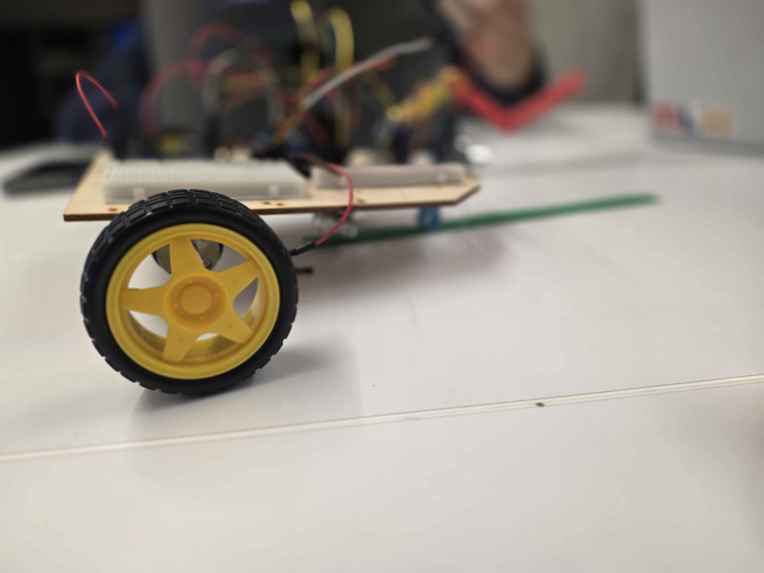
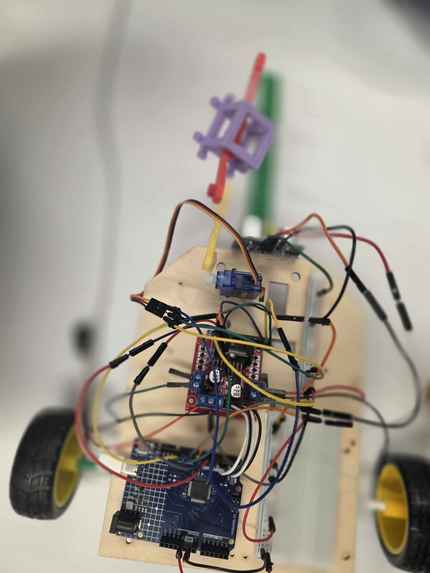
Adem Bot + Adem Project
Adem Bot is a challenge-ready robot built to complete the UTRA Hacks 2026 closed challenges, paired with an immersive 3D interactive digital twin that lets teams test components, wiring, and configurations virtually—so you can iterate faster without physically handling hardware.
Problem & Background
Robotics challenges move fast, but hardware iteration is slow and risky. Rebuilding configurations takes time, wiring mistakes happen, and it’s hard to validate an idea without physically assembling it.
Most tools are either:
- CAD-only (nice visuals, but limited interaction for wiring + testing)
- Code-only (fast iteration, but hard to understand physically)
We needed a way to prototype and test robot changes in an easier environment before touching the real robot.
Motivation & Goal
The goal of Adem is to make robot development:
- Faster (test more ideas in less time)
- Safer (fewer physical wiring/build mistakes)
- More immersive and intuitive (natural interaction instead of only mouse/keyboard)
- Less hardware-dependent (simulate changes digitally first)
In short: build and test better robots without constantly handling hardware.
What It Does
Adem Bot (Challenge Execution)
- Built to complete UTRA Hacks closed challenges
- Designed with a modular architecture so it can adapt to different challenge constraints
- Focused on reliability and repeatability for competition-style tasks
Adem Project (3D Interactive Digital Twin)
- Real-time 3D exploration: inspect every area of the robot digitally
- Add components in-app: attach motors, servos, wheels, and other modules
- Wire it virtually: map components to ports and visualize connections clearly
- Test configurations digitally: validate layouts and system setup before building
- Camera-based finger tracking controls: interact with the 3D robot using your hands, tracked through your camera—making the experience more immersive, more intuitive, and improving accessibility for users who prefer not to rely on traditional mouse/keyboard input
Data + Lifecycle Backbone (Snowflake)
We built a cloud-based system using Snowflake to keep a permanent, versioned record of our robot’s technical schematics and parts. This makes every update traceable, and lets the 3D interface act as a live dashboard that always reflects the most up-to-date robot configuration and inventory.
We deployed a Multi-Cloud Cyber-Physical System that uses Snowflake for Immutable Lifecycle Management. By centralizing our robot’s Technical Schematics and live inventory in a Cloud-Native Warehouse, we’ve achieved Real-Time Observability, allowing the 3D interface to act as a live dashboard for Distributed Asset Tracking.
What that enables
- Version history you can trust (what changed, when, and why)
- Live component database (dimensions + availability + low/high stock)
- Real-time observability directly inside the 3D interface
On-Chain Interaction (Solana Actions / Blinks)
We integrated Solana Actions/Blinks so users can mint their robot assemblies as compressed NFTs using only hand gestures—with no wallet connection UI required.
How it works
- The system generates a QR code that encodes a Solana Action
- Any compatible wallet can execute the action by scanning the code
- This makes blockchain interaction feel as simple as: build → gesture → scan → mint
What that enables
- One-step minting for robot assemblies (as digital collectibles / build proofs)
- Frictionless UX (no separate wallet-connect flow)
- Shareable build identity tied to a specific assembly/configuration
What I Learned
- Building an interactive 3D digital twin that supports real configuration workflows
- Designing camera-based finger tracking as a practical UI for engineering tools
- Modeling components + ports + wiring in software (so it behaves like a real build process)
- Connecting a cloud-native data warehouse to a real-time app for inventory + system visibility
- Speeding up iteration by moving from “hardware-first” to digital test-first
- Using Solana Actions/Blinks to create a low-friction on-chain UX for minting assemblies
Built With
- 3D Interactive Software: [add your framework here: Unity / Three.js / Unreal / etc.]
- Cloud Data Warehouse: Snowflake
- Blockchain UX: Solana Actions / Blinks, compressed NFTs, QR-based execution
- Core Features: digital twin, component configurator, wiring visualization, camera-based hand tracking, real-time inventory + schematics sync
Keywords
Robotics • Cyber-Physical System • Digital Twin • Real-Time 3D • Virtual Prototyping • Wiring Visualization • Component Configurator • Hand Tracking • Finger Tracking • Immersive UI • Accessibility • Cloud-Native Warehouse • Immutable Lifecycle Management • Real-Time Observability • Distributed Asset Tracking • Solana Actions • Blinks • Compressed NFTs • QR-Based Execution • Modular Robotics • Rapid Iteration
Built With
- digitalocean
- gemini
- mediapipe
- openai
- snowflake
- solana
- three.js





Log in or sign up for Devpost to join the conversation.