-
 GIF
GIF
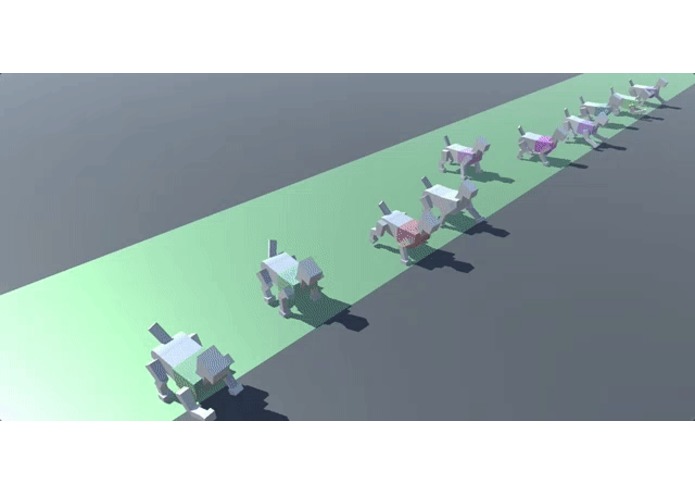
Competing for the best Fitness Score. GIF in the description!
-
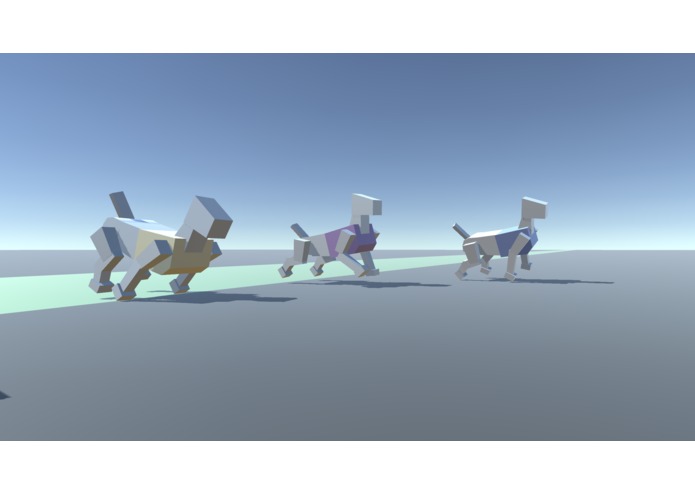
Action shot. They look posed like real dogs!
-
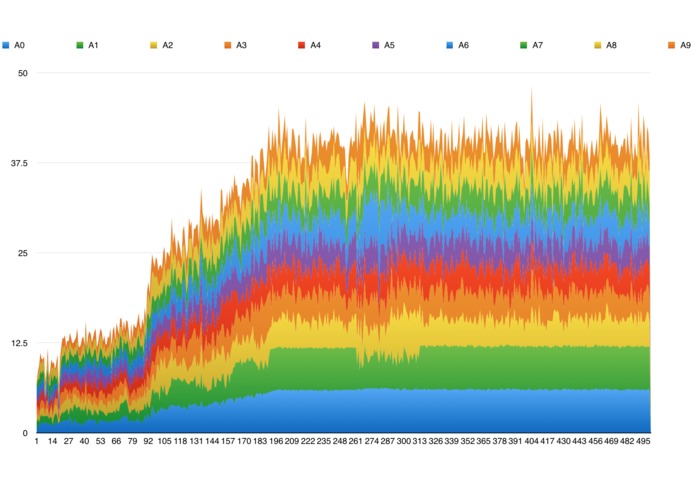
Plateaus are where a pup feels comfortable and doesn't want to change, but with a lucky mutation it can overcome that (around gen 92)
-
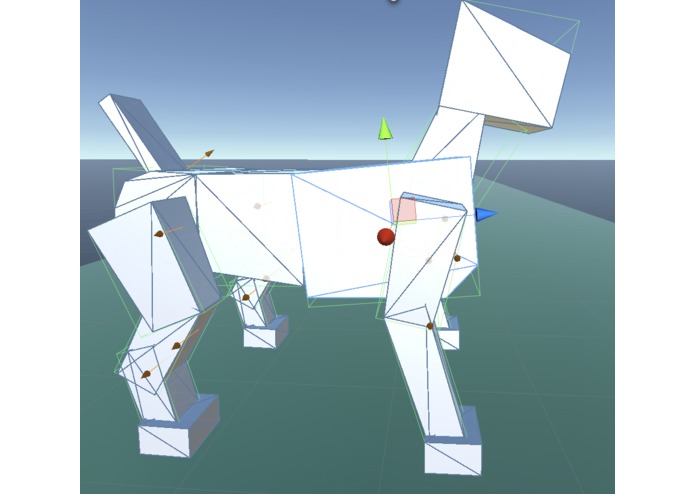
The dogs are simulated accurately using NVIDIA physics engine
-
 GIF
GIF
Pups wear colored "Jerseys" to indicate their lineage.
-
 GIF
GIF
Variations in the dogs per generation and no muscle pairings creates a very interesting result






GIFs!!
http://i.imgur.com/aPoRP5A.gifv http://i.imgur.com/uk81En5.gifv http://i.imgur.com/jxZ7sZQ.gifv
Presentation: https://docs.google.com/presentation/d/1uRFV-Djx5rJawTdk-jRuddg3tr48bpYid7b2VJb78BE/edit?usp=sharing
Inspiration
Inspired by videos like this about machine learning, and our fascination with how animals know how to move. https://www.youtube.com/watch?v=pgaEE27nsQw
What is it?
We created a physically simulated quadruped that uses machine learning to move in a 3d environment. The quadruped, which is modeled after a canine, uses a custom genetic algorithm to learn to walk. We simulated their muscles and evaluated the dogs using a fitness formula, which determines the best dogs that should start the next generation. Each dog's purpose in life (as evaluated by the fitness score) is to walk as far as possible, with bonus points for standing up and keeping their head up high.
The dogs have instincts, which are rules to speed up the evolutionary process. Their primary instinct is to move the limbs in a random sinusoid pattern, not completely sporadically. They also have an optional instinct to move left and right muscles in sync. The physicality of the dogs includes many physics based bones and joints, which are stimulated by the dog’s brain to move randomly. No premade animations were used and all walking patterns are emergent.
Use-cases
There are many possible future directions to explore with machine learning. These techniques can be used to make learning robots, optimize processes, and improve self driving vehicles.
Future ideas
If this project were continued, we would like to have our creatures learn to respond to variables such as seeking out food sources, avoiding obstacles, or adapting to changes in the simulated physical environment. We also had more animals planned than we had time to model but the code works for any animal, even a human or a fish. In the future, we would like to explore different gaits such as trotting or running. Motions such as sitting, standing up, and jumping may require more thorough biomechanical modeling. In the future, our models might have a flexible spine, muscles, and tendons in order to produce more lifelike simulations.









Log in or sign up for Devpost to join the conversation.