-
-
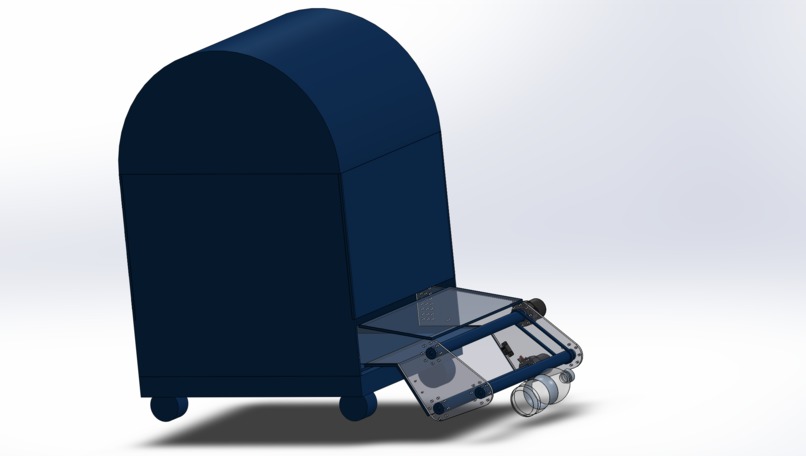
v3 CAD of SwyftForge Prototype
-
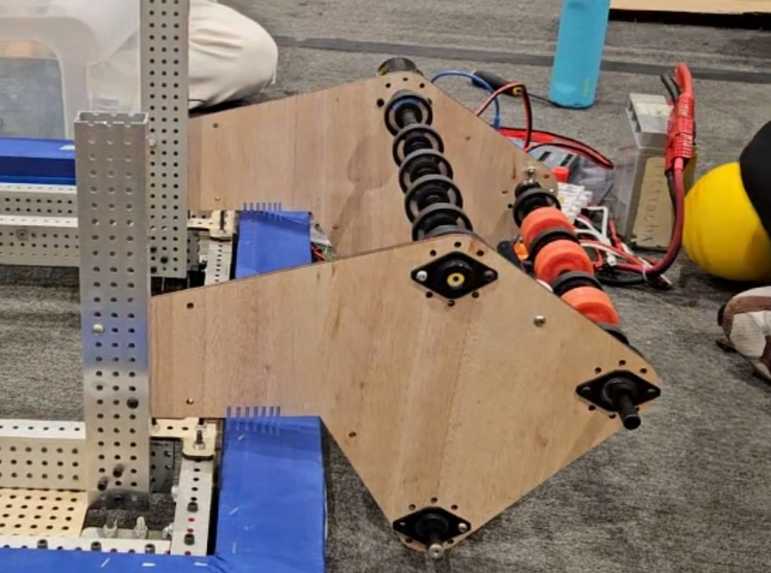
v2 Built Prototype
-

v3 Built Prototype



Inspiration
Just a few weeks ago, my dog was barking at a lady on my front lawn. It was cold outside, and she was picking up litter on the street out of her own free will. I live in a safe, suburban neighborhood, yet her trash bag was almost full. I thought: no one should have to do this in the cold—this could be automated and done way more efficiently. Then, based on a 2020 National Litter Study:
The US produces about 24 billion pieces of roadside litter every year.
AND it costs Americans $11.5 billion annually to remediate that trash.
As a student, I realized the mechanical intake prototype I was developing for an FIRST Robotics Competition game could be extended as a proof-of-concept for an autonomous trash collector to save time and keep humans safe from hazardous litter.
What it does
- SwyftForge autonomously detects litter and can be driven manually or run in autonomous mode.
- Navigates public spaces like parks and sidewalks safely.
- Collects trash of many sizes and types by intaking it and storing it in its body to be emptied at deployment sites.
How we built it
- Started by defining metrics: fast mechanism to intake trash and flexibility for different trash sizes.
- Designed CAD prototypes in SolidWorks, cut parts from plywood, assembled, and tested with balls as proof-of-concept.
- Iterated multiple prototype versions, refining materials for flexibility and grip.
- Sensors count and detect trash. Cameras/LiDAR help detect litter with object detection.
Challenges we ran into
- Figuring out what to use for object detection that adheres to compliance - using cameras (insta360, etc.) could pose risks to data privacy in public spaces, so we leaned toward LiDAR.
- Finding a good material that would pick up objects of different sizes and shapes, withstand liquids and have a strong grip on was quite challenging. We solved this with soft, grippy silicone materials that could handle it.
Accomplishments that we're proud of
- Fully functional prototype built in less than one week!
- Accurate and very rapid trash intake.
- Rapid iteration and clean CAD design workflows.
Super happy that we collected valuable data from each different prototype version, and greatly improved going from v1 to v3 of our prototype.
What we learned
- Building a functional intake is feasible, but compliance is key.
- Cameras can improve detection but raise privacy concerns in public spaces, so LiDAR is safer.
- Choosing the right object detection ML model is critical for efficiency (YOLOv8, etc.).
What's next for SwyftForger
- Add a sorting mechanism inside the robot to separate recyclables.
- Expand waste capacity and battery life for real-world deployment.
- Programming and fine tuning object detection ML models.
- Explore partnerships with city councils.
Built With
- onshape
- python
- solidworks




Log in or sign up for Devpost to join the conversation.