-
-
Arduino 1
-
Arduino 2
-
Camera / Platform



Inspiration
We wanted to solve a challenging engineering problem using a combination of our team's software and hardware skills, and had seen previous YouTube videos of people making similar personal projects.
What it does
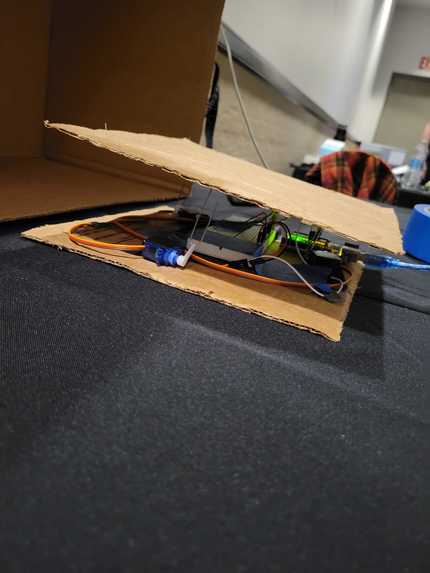
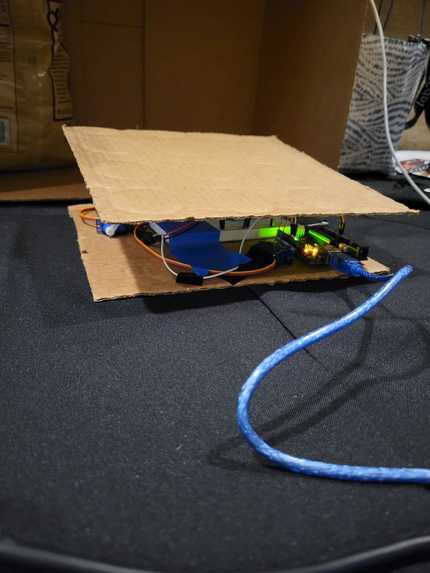
Our project balances a golf ball on a tilting robotic platform by detecting its location and movement information.
How we built it
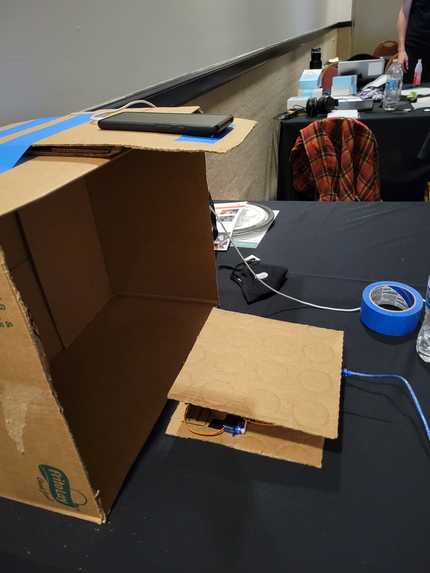
We used a phone camera routed to a laptop via DroidCam in order to track the ball; Python code for the object detection, PID controller, and serial data transmitter; and C++ on Arduino hooked up to servo motors for the physical platform + lots of cardboard and tape!
Challenges we ran into
Some challenges included finding materials to build our project out of (platform built from recycled cardboard packaging), not having enough motors (used triangular coordinate system), making a phone mount for the camera, and getting the object detection to be fast and accurate enough for real world functionality!
Accomplishments that we're proud of
We succeeded in meeting our goals/requirements and leveraged all of our team members' strengths to create something together. Everyone contributed, and we can confidently say that this wouldn't have been possible without each other's help.
What we learned
We learned the importance of having quality materials and working together to solve problems!
What's next for The Tilter
Some improvements/features that we considered were using sturdier and more robust materials such as wood, glass platform, and ping pong ball. Also, making a game using a joystick platform controller and improving our algorithm to account for static friction.





Log in or sign up for Devpost to join the conversation.