-
-
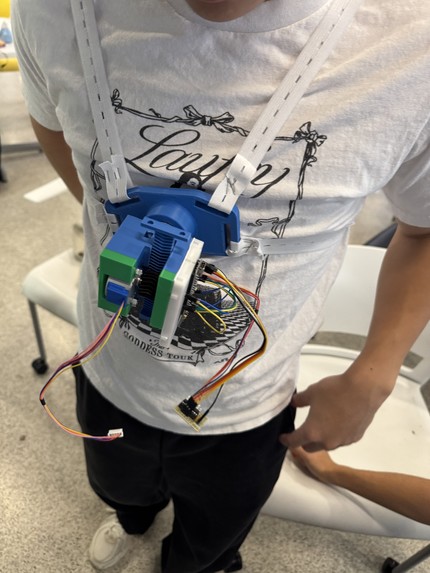
Julian with the gimbal on
-
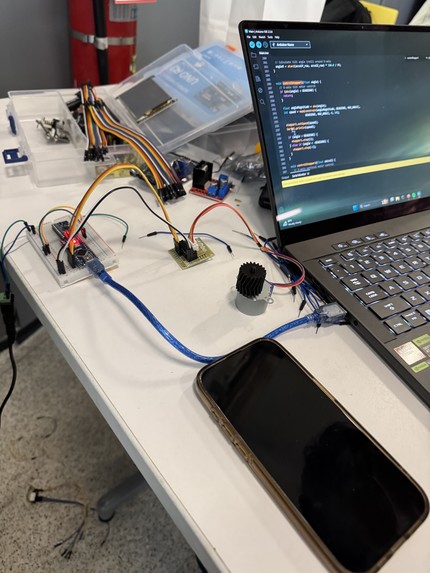
Our electronics
-
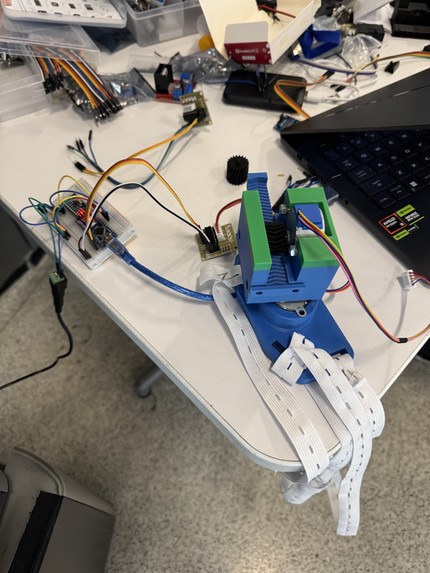
Our prototype fully assembled
-

Ken wiring the gimbal to Julian
-
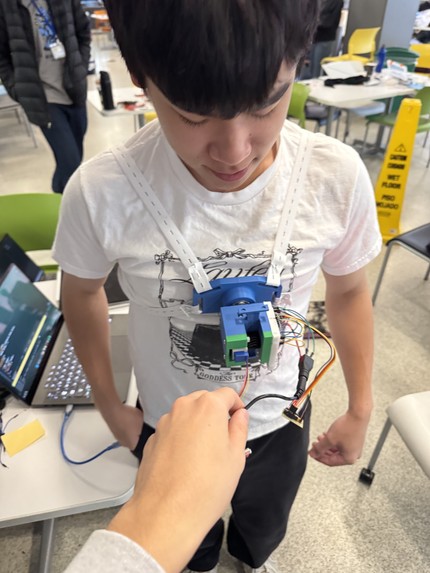
Another angle





Inspiration
We initially started with trying to explore the idea of making an upright double pendulum balancing robot. As part of this process, we decided to first make a single pendulum balancing robot. As we began planning the details for the robot, we wanted to make something with more tangible use and impact. We eventually decided on a gimbal-type device mounted to the chest, where a camera would be connected. This gave us a practical project that could be useful in real life applications, while also allowing us to explore various challenges in engineering.
What it does
The chest plate of the gimbal is attached using a harness, which is then attached to the camera and rest of the gimbal. Any vertical movement the person makes will be countered by the vertical motor, ensuring that the camera stays level. Similarly, the rotation of the camera due to various human movements is countered by the rotational motor, turning the gimbal in the opposite direction. These two feedback mechanisms ensure that the movement of the camera is minimized, ensuring clearer and steadier videos.
How we built it
The process was split into three parts: CAD, software, and electronics. Once we had received all our hardware from MakeCU, we then tested the IMU and worked out the vertical adjustment. Following our success, we then began to CAD our project. We fleshed out rough drafts for our frame, pinion and rack, chest module, and spacers, and put together our first prototype. After testing, we then adjusted and reprinted. While the print was going, we began to work on software, and finished our rotational and vertical movement software. We put everything together, and then continued to adjust until we ended with our final product.
Challenges we ran into
At the beginning of the hackathon, our team hadn’t existed yet. Julian and Brandon were in another group and Teddy and Ken were in another. However, due to the size of both of our respective groups, we were all told to split up. We then decided to form a new group and work together. We were behind all the other teams by an hour and half, as we were only told to leave our old groups a while after the hackathon began. Despite this, we worked quickly to create ideas and order parts, which were quickly running out. We struggled with the physics of the gimbal, which posed a larger challenge than we thought. In order to make sure the IMU data was interpreted correctly, we actually employed concepts from our physics mechanics class. Our rotational movement continued to give us trouble, but after some brainstorming and adjustment of parameters we managed to get a working final version.
Accomplishments that we're proud of
We came into the hackathon not expecting anything, only looking to gain experience. Having overcome the challenges described above, we were incredibly proud that we were able to produce a finished, working prototype. The moment where we first got the rotational adjustments working was incredibly exciting and a moment we will all definitely remember.
What we learned
We learnt how to collaborate efficiently in larger teams, assigning different people for different roles while still working together on a final product. We also learned valuable lessons about ideation and turning ideas into a physical product. We found that sketching out our idea helped a lot with the CAD designing and even software development process.
Built With
- arduino
- onshape


Log in or sign up for Devpost to join the conversation.