-
-
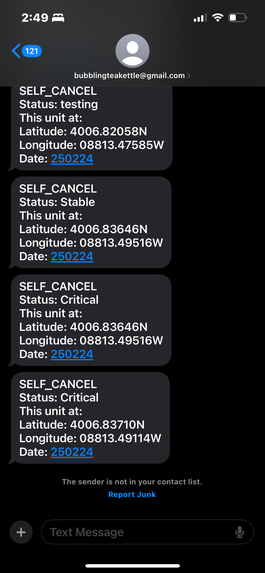
gis messages
-

eularian model #2
-

eularian model #1
-
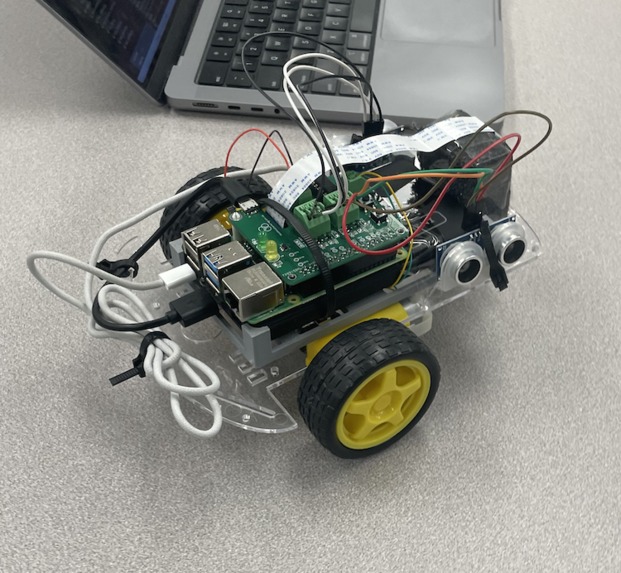
Baymin




Inspiration
Our inspiration stemmed from the desire to create an autonomous vehicle capable of aiding in search and rescue missions. We envisioned a rover-like vehicle equipped with advanced technology to detect and assist humans in various landscapes.
What it does
Baymin is designed to detect the presence of humans in different environments, identify them, and assess their condition. It employs computer vision algorithms to recognize humans and analyze their vital signs, including pulse rate, to determine if they are in critical condition. If a person is found to be in distress, Baymin notifies medical personnel and provides the precise location on a map for swift assistance.
How we built it
We built Baymin using a Raspberry Pi with a custom Pi-hat and assembled it on an acrylic chassis equipped with motors, wheels, and foam for stability. The software stack comprised several Python frameworks. We implemented code to utilize ultrasonic transmitters for maneuvering the vehicle, camera functionalities for computer vision-based human identification, and algorithms for analyzing vital signs using Eulerian models and Fourier transforms. Additionally, we developed logic for the motor drive chain to adapt to the surrounding terrain. Baymin incorporates Geographic Information Systems (GIS) to ping a phone's location via SMS message, enabling real-time positioning of individuals in distress. This feature allows Baymin to not only pinpoint the location of the person found but also relay crucial information to responders promptly. Additionally, the system is programmed to provide status updates on the individual's condition, whether they are alive, in critical condition, or deceased, facilitating informed decision-making by rescue teams.
Challenges we ran into
One significant challenge we faced was fine-tuning the computer vision algorithms to accurately identify humans in various landscapes and lighting conditions. Additionally, integrating the vital sign analysis functionality posed technical difficulties, particularly in ensuring real-time processing and accuracy.
Accomplishments that we're proud of
We're proud to have developed a functional prototype of Baymin capable of autonomously detecting and assisting humans in distress. Overcoming the technical hurdles and achieving reliable performance in both human detection and vital sign analysis was a significant accomplishment for our team.
What we learned
Throughout the project, we gained invaluable experience in robotics, computer vision, and signal processing. We deepened our understanding of Python frameworks and learned how to effectively integrate hardware components with software solutions in a practical application.
What's next for Baymin
In the future, we aim to further refine Baymin's capabilities and enhance its robustness for deployment in real-world search and rescue missions. This may involve optimizing the hardware design for durability and mobility, improving the accuracy of vital sign analysis algorithms, and integrating additional sensors for enhanced situational awareness.
Built With
- keras
- opencv
- python
- raspberry-pi
- tensorflow





Log in or sign up for Devpost to join the conversation.