-
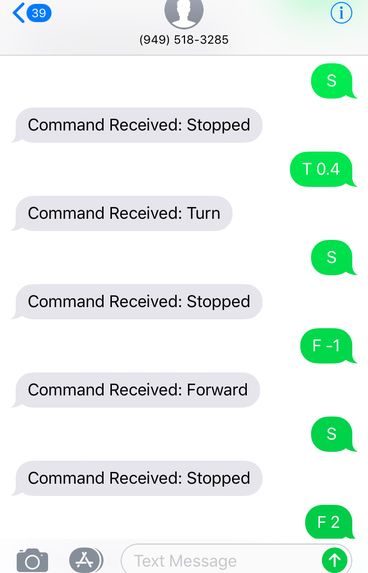
SMS example
-
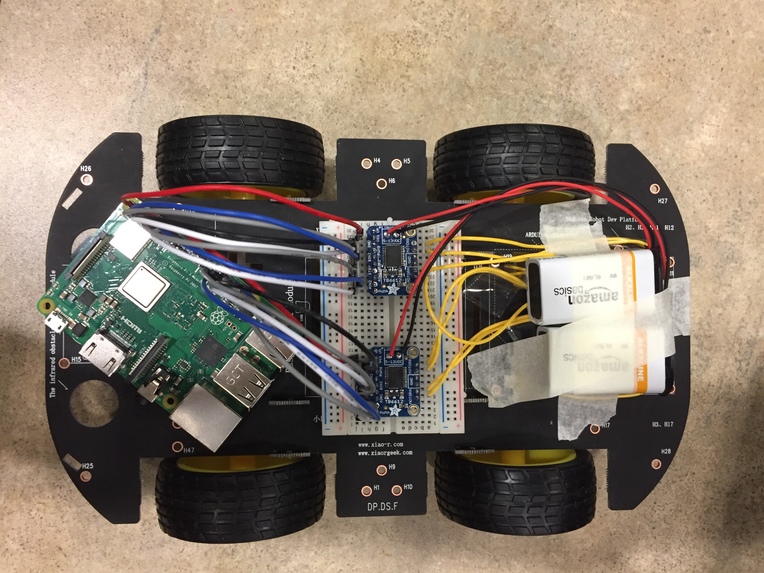
Robot top
-
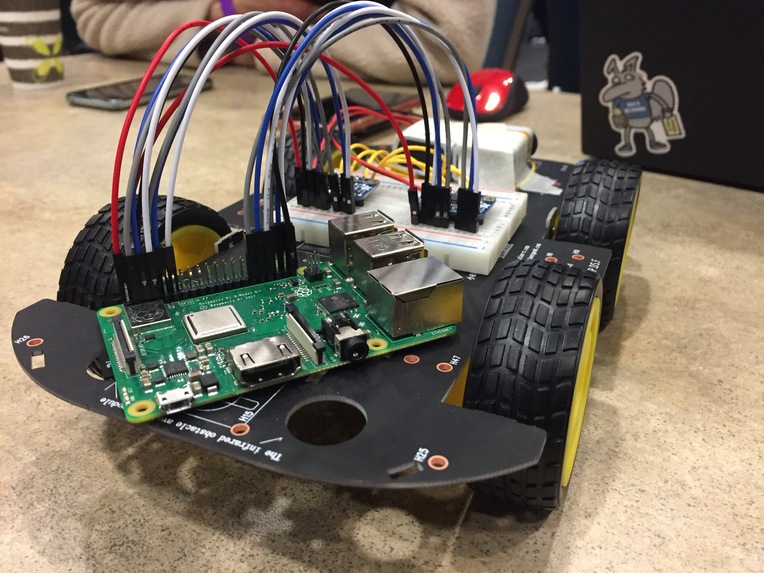
robot angle
-
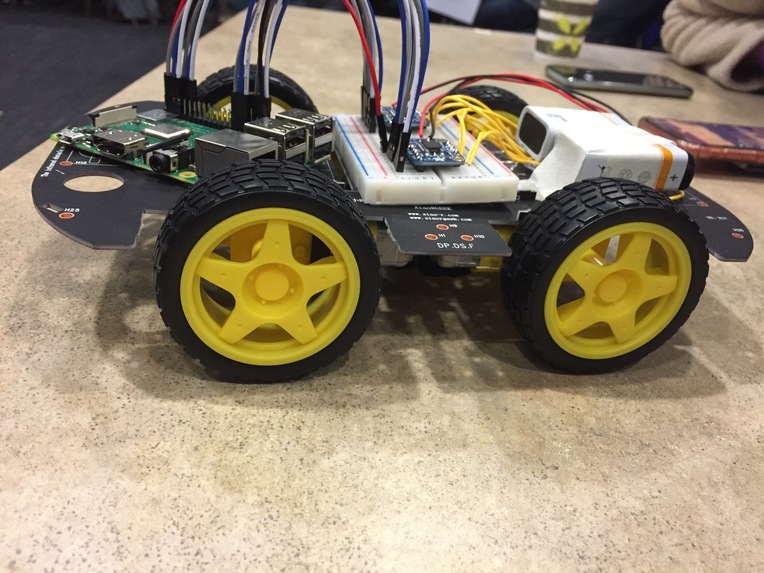
robot side




Twilio Phone Number: (949) 518-3286
SMS Commands:
Forward / Backwards: F [num]
Turn: T [num]
Stop: S
**[num] is a float between -1 and 1
**see examples below
Inspiration
Wanted to combine two technologies that no one would have really though to combine. Traditionally twilio has been used as a communication tool between multiple people. So we though that using twilio as a remote control platform would be really interesting take on their API.
What it does
The Botcom is a Raspberry Pi-based rover, but with a twist: its movements can be controlled by SMS. Using specific commands, Botcom is able to turn and move forward or backward. By texting the number, +1 (949) 518-3286, the user can text commands to instantly control Botcom's movements. For example, texting "F 0.5" will move Botcom forward at 0.5 times its max speed, and texting "F -0.5" will move Botcom backward at 0.5 times its max speed. Once the user issues a command, Botcom will text them back a confirmation of their command. And given that anyone can text this number, Botcom can take inputs from multiple users and will just move based on the queue of commands.
How we built it
We came in with the hardware for the rover. We had the four motors and wheels attached, and the Raspberry Pi, breadboard, battery, and motor controllers. During the hackathon we used libraries to control the speed of each individual motor through the motor controller. Using the Twilio API, we were able to have full SMS capabilities for our number. Twilio's API allowed Botcom to receive texts, which was then stored as a command. Then, Botcom could send a message back to the user with the command they chose.
Challenges we ran into
While working on this project we constantly ran into problems with connecting to the raspberry pi. Since none of us had a monitor the only way we could connect to the raspberry pi was through ssh. That proved to be difficult since we still needed the ip address of the raspberry pi.
Accomplishments that we're proud of
Coming into the project, we’ve used Raspberry Pi in a couple of small projects, but not as complex as how we used it in Botcom. As a group, we had little to no experience with pigpio, but we felt accomplished to be able to use it for controlling the motors. Lastly, we felt accomplished being able to use Flask with Twilio’s API to implement the SMS capabilities.
What we learned
We learned how to code for a Raspberry Pi and take it a step further by integrating an API. Using our code in tandem with a third party library elevated Botcom's functionality.
What's next for Botcom
Looking ahead, we wanted to integrate the functionality of a camera on the front of Botcom. In the short term, we would likely add a function to take a picture and text it back to the user. And for a long term goal, we plan to integrate other API's to use the camera for collision detection so Botcom will move without crashing.










Log in or sign up for Devpost to join the conversation.