-
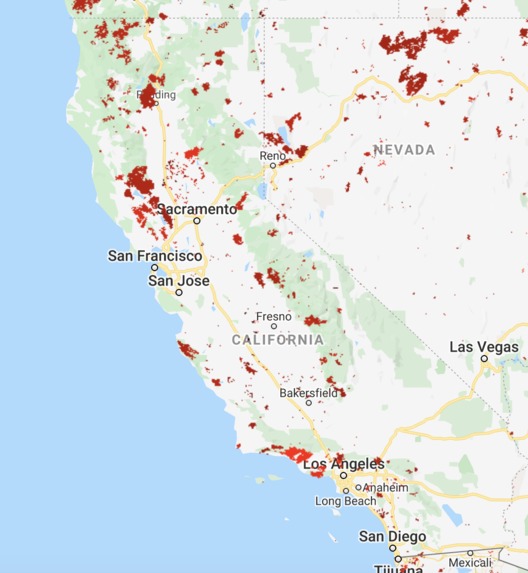
2014-2018 wildfire data
-
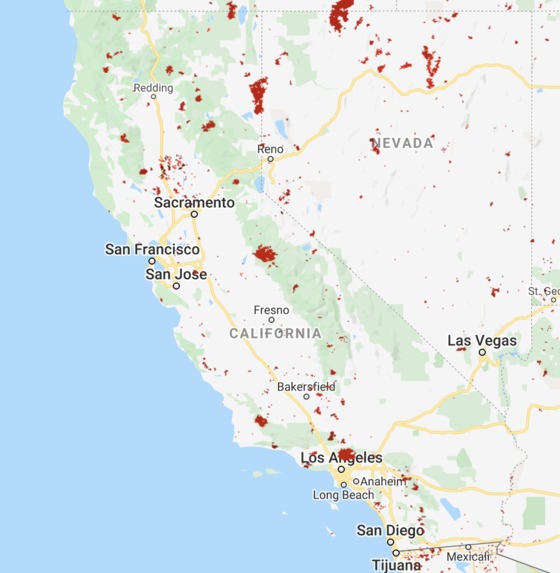
2009-2013 wildfire data
-
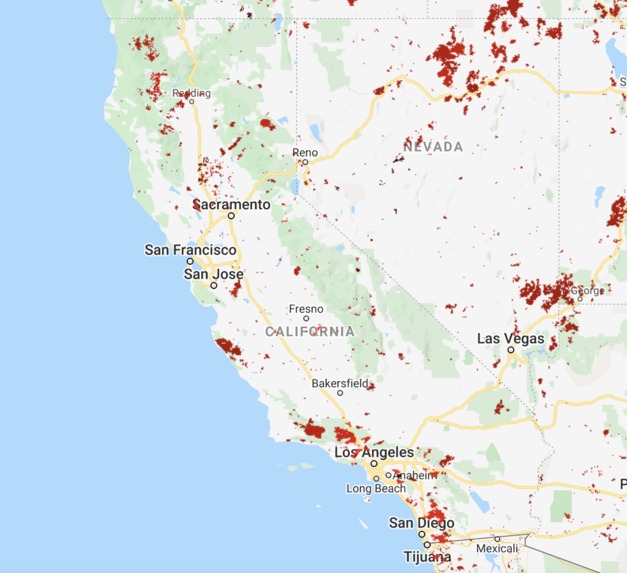
2004-2008 wildfire data
-
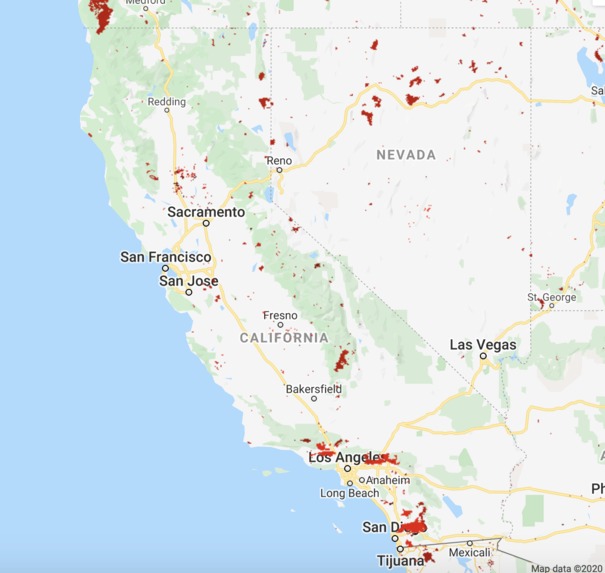
1999-2003 wildfire data
-
-
-







Inspiration
As is known to all, the wildfire issue is becoming more and more serious during recent years, especially in California. It is very hard to find out where the wildfire happens and where it is heading to because satellite monitoring have half-day delay and the wildfire often spread too quickly before firefighters could possibly take actions. So, we built up the path planning software for drones to detect and image wildfires with efficient and safe path. A beautiful picture of human beings’ future lives is currently drawing by us and we are desired to devote ourselves to this spectacular world.
What it does
It mainly deals with the collection of historic data of wildfire in California. Then the drones are able to learn which path is the most efficient, the most economic way, taking advantage of machine learning algorithms, to the place where fire started. People then can understand the situations of wildfire better.
How we built it
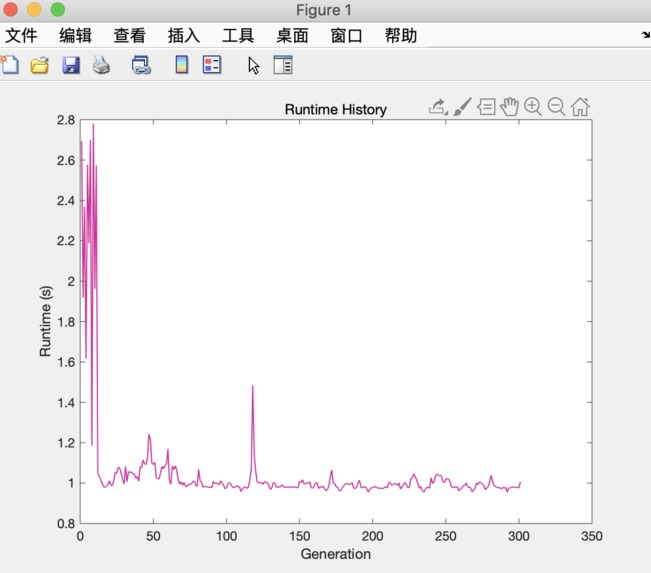
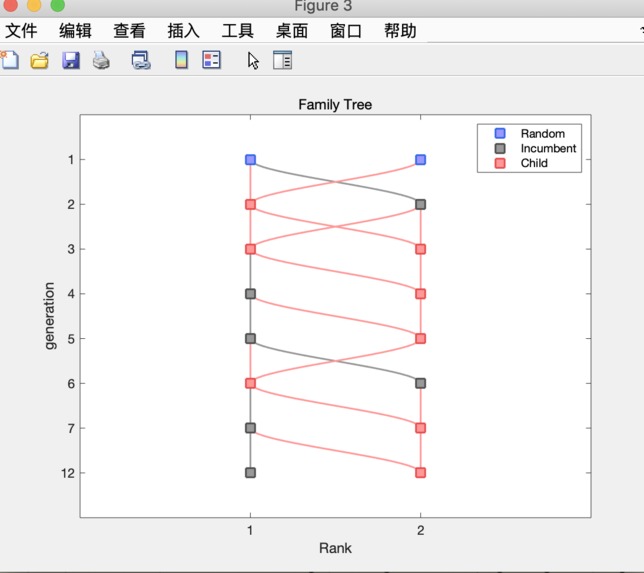
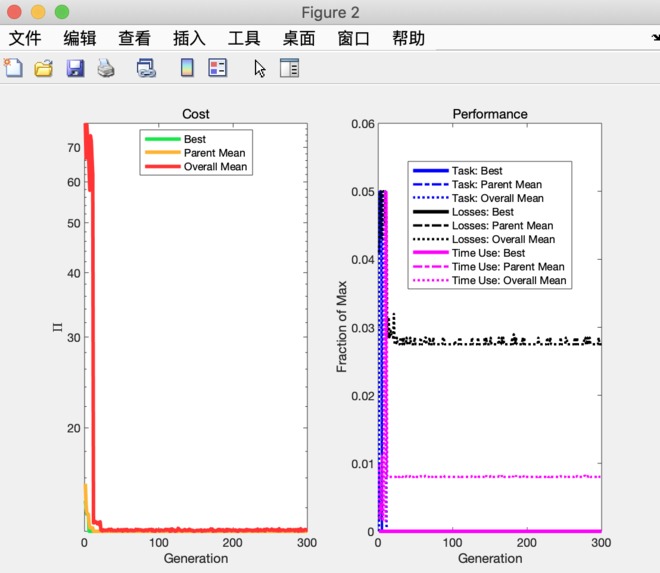
We work on collecting historical wildfire data with the help of datasets provided by API like Google Earth, or NASA public open sources, visualizing them, and then figuring out the most vulnerable sites or most important sites and setting coordinates to them. We established UAVs path planning model using machine learning algorithm, data we get, and simply simulated the hardware part combining software with hardware, in NVIDIA JetBot. We then use JetBot to simulate UAV in terms of motion controlling, image shooting and identification, since they have similar approaches, algorithm, sensors and detectors.
Challenges we ran into
When we were finding data, we didn't know which data was the most reflective one. We had data of fire for the past 24h, 7 days, or past few years. There are lots of factors that can influence the path of drones, and it's hard to consider wind, weather, fire enlargement all into account. It was also hard to do the demos or simulations, since we didn't have a drone that allows deep learning.
Accomplishments that we're proud of
Convincing visualized wildfire historic data; Strong machine learning model that could figure out the most efficient UAVs detection path when wildfire happens; Successful assembled and set a ground robot car and taught it doing basic motions and image processing which could be considered as the same operation approaches on drone; Consumed a lot of food and drink; Enjoyed two days amazing TreeHacks; Exchanged and inspired new ideas; Made new friends......
What we learned
Too much to cover everything we have learned. To name a few, some useful and powerful API tools, knowledge on computer vision, machine learning, AR/VR, how to assemble and initialize a ground robot, cooperation and communication skills... and fun things like how to find a good place to sleep safe and sound when there is no bed, Stanford is not much worse than Berkeley as we had thought hh....
What's next for Fire Drones!
Adding various factors like wind direction, wind speed, and vegetation area into the algorithm can make our path model more appliable. We can also build a nice user interface that can show firing areas and the path of drones. Images sent by drones can also be displayed and then use them to train the deep learning model.



Log in or sign up for Devpost to join the conversation.