-
-
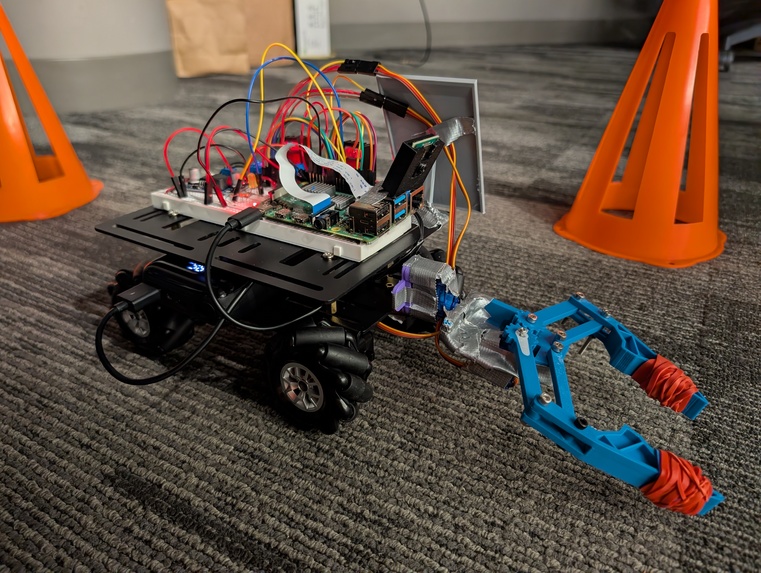
LAVAgirl Side View
-
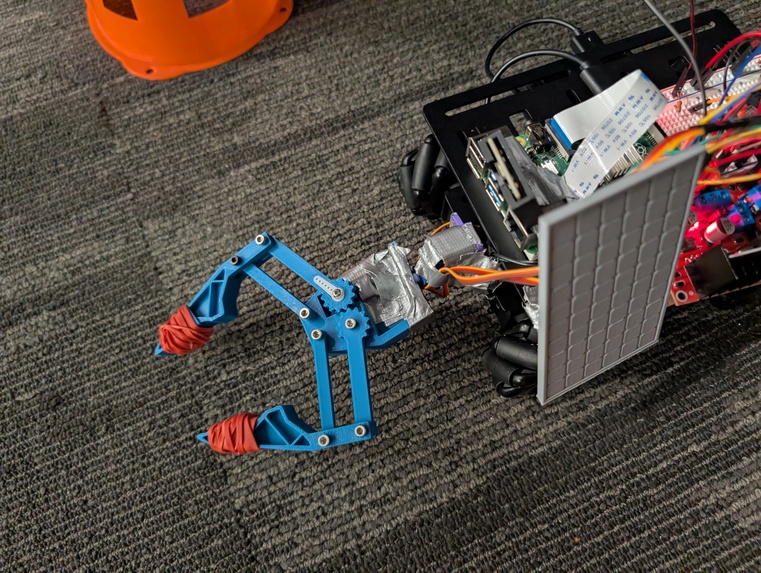
LAVAgirl Overhead View
-
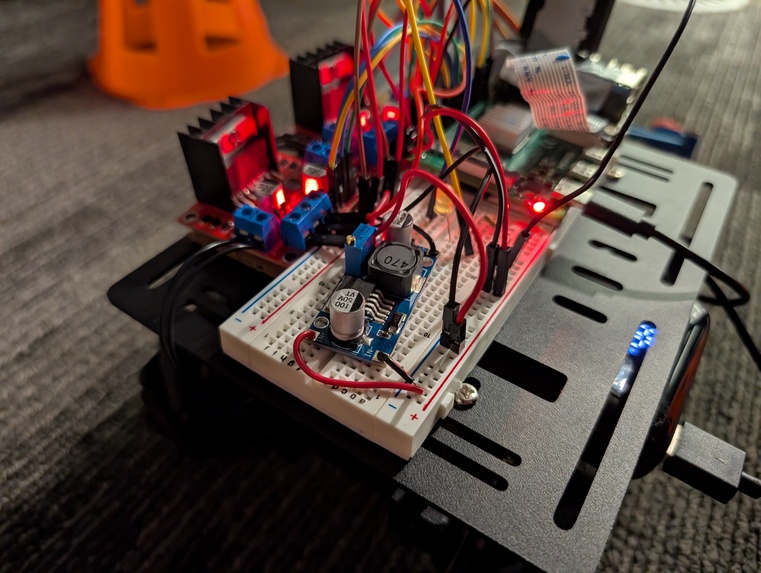
LAVAgirl Back View
-
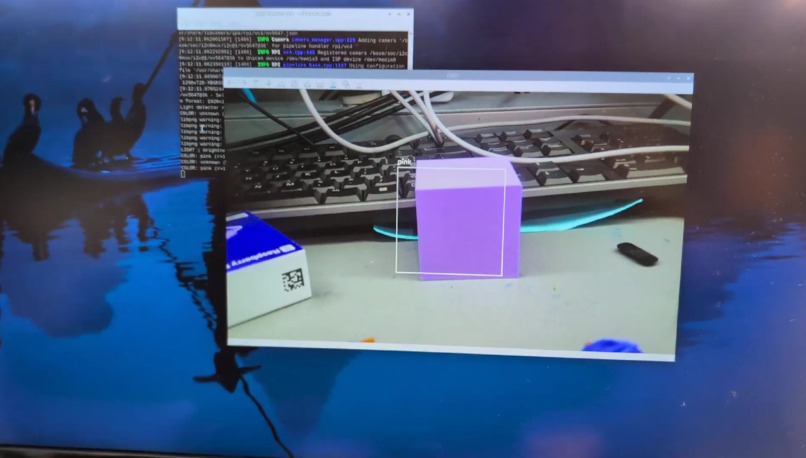
Object Detection
-
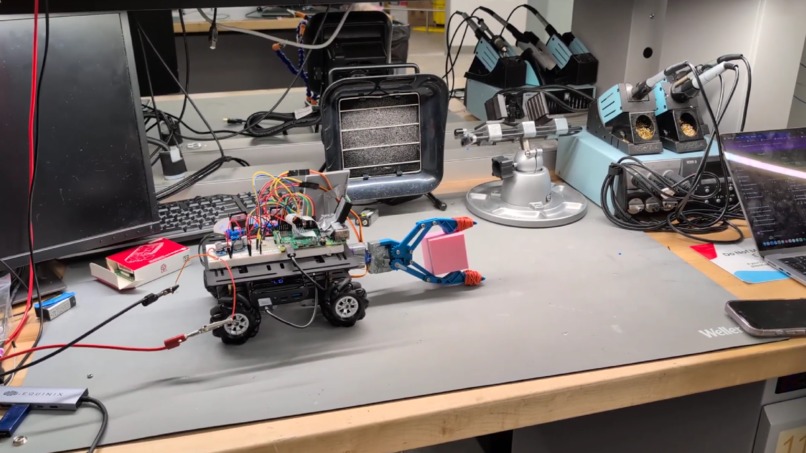
Rotated Grabber





About
LAVAgirl (Lunar Autonomous Vehicle for Assessment) is an autonomous robot designed to simulate exploration of lunar lava tubes, underground cave systems on the Moon that could one day support long-term human settlement. As these caves are dark, unstable, and inaccessible to humans, robots must be deployed to explore first. Our robot navigates a cave-like environment and makes autonomous decisions using a camera-based perception system with brightness detection and object tracking. It also features a pivoting wrist gripper to manipulate objects such as supplies or waste, modeling how real lunar scouting robots could interact with their environment and prepare for future human missions.
Sources:
- NASA360
- Robot Gripper: https://www.thingiverse.com/thing:715525
- Micro Servo Holder: https://www.thingiverse.com/thing:1860116
- Solar Panel: https://www.thingiverse.com/thing:1073265
- Camera Holder: https://www.thingiverse.com/thing:262061/comments
- “Lava Tunnel”: https://www.thingiverse.com/thing:5354586
- Carrer, L., et al (2024). Radar evidence of an accessible cave conduit on the Moon below the Mare Tranquillitatis pit. Nature Astronomy, 8(9), 1119–1126. https://doi.org/10.1038/s41550-024-02302-y
Built With
- gpio-zero
- lgpio
- open-cv
- pigpio
- python
- raspberry-pi

Log in or sign up for Devpost to join the conversation.