-
-
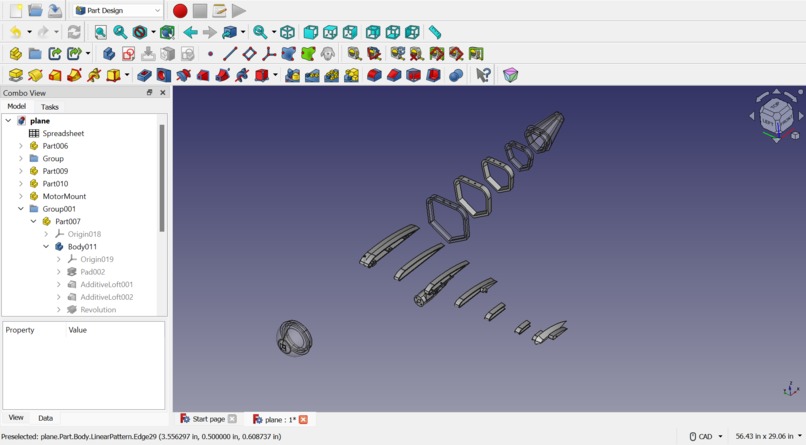
Partial CAD model of the plane
-
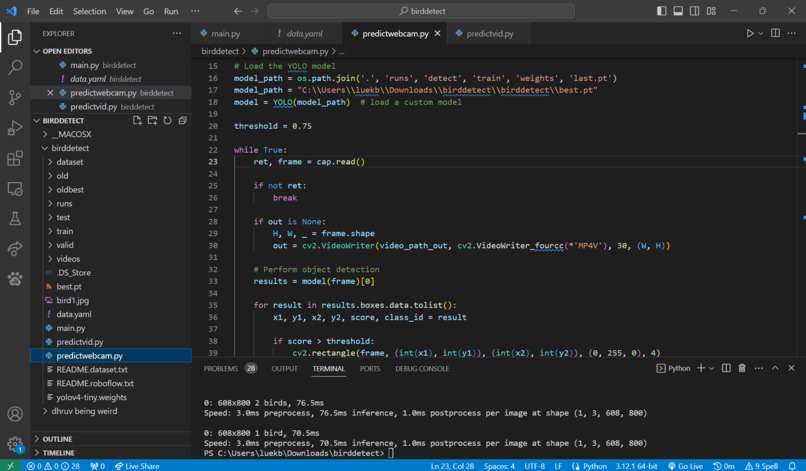
Python code for the in-air collision avoidance AI
-
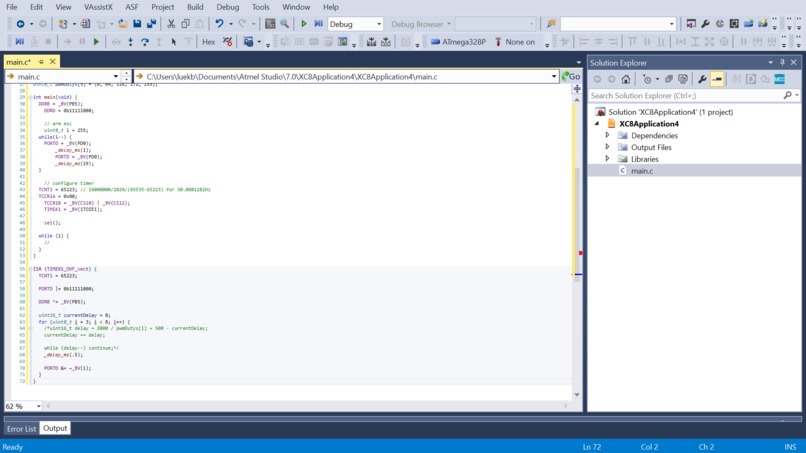
Partial C code for the receiver
-
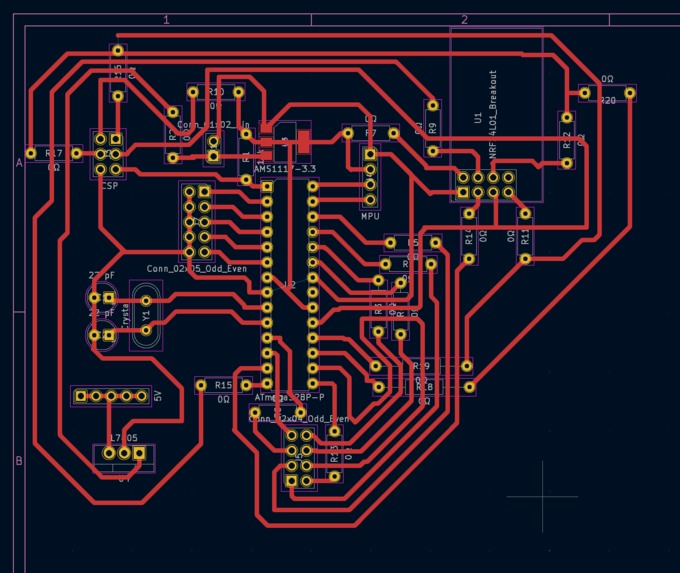
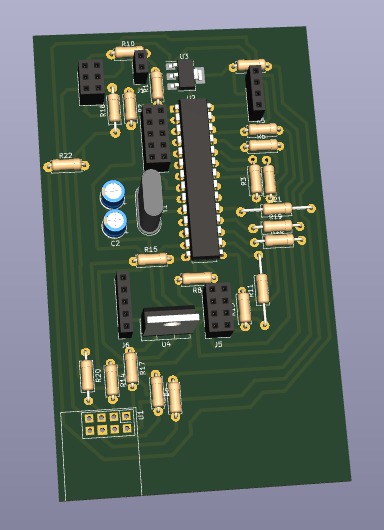
PCB Design 1
-
PCB design 2
-
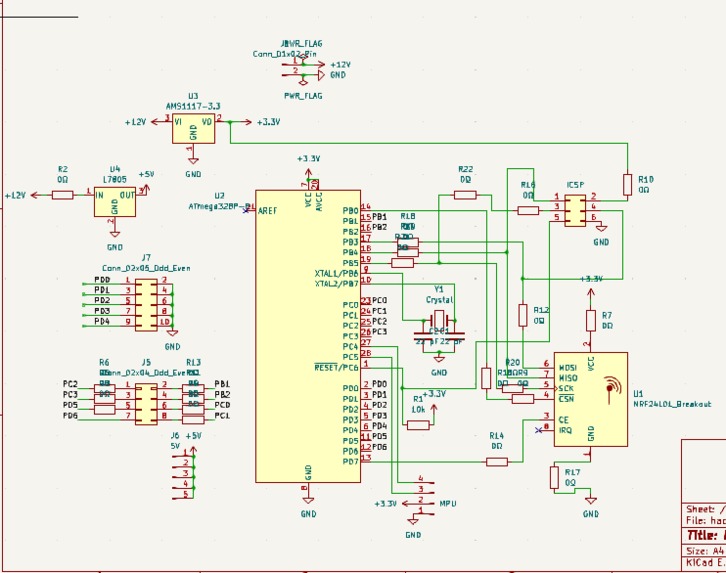
Schematic of final PCB
-

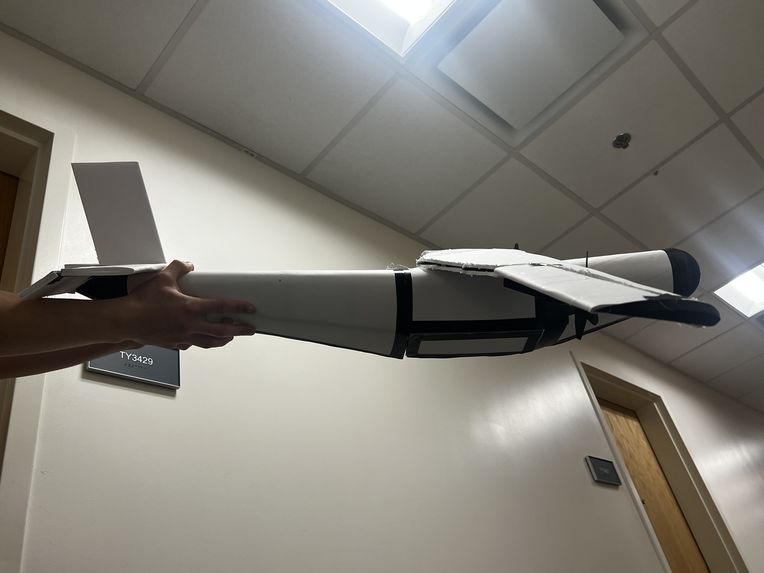
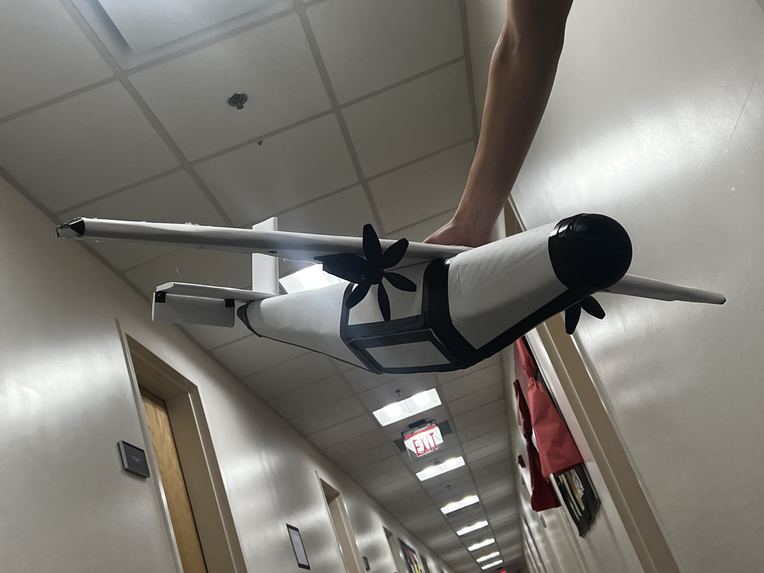
Rear frame
-

-
-
-

-













Inspiration
Starships are always roaming around campus. During high volumes of student orders, they often end up stuck, backed up behind crosswalks, hit by cars, or stranded in snow needing students help to move them back towards their path. Rather than have the starships get in people's way, we decided to look for a better alternative: to use aerial food delivery services.
What it does
Our plane will load and deliver food to students around campus via parachute by releasing the food in a secure package to a designated delivery field located near their dormitory, allowing students to receive their orders in a cheaper and more timely manner. In practice it would likely be launched from a form of slingshot, and fly into a net for recovery, as these are both proven techniques for takeoff and landing that will reduce the cost of the plane by no longer needing a landing gear and make it less prone to breaking since there would be fewer moving parts
How we built it
We built our delivery plane by first modeling what we wanted the plane to look like in FreeCAD, then exporting it to a .STP file to be used by another group member in Fusion360 who then divided up the plane into different sections to be reconnected later by metal rods and the gaps covered by foam board. This is also when the bottom door was designed. Another group member worked on the PCB design to be manufactured on a CNC machine during this time, while our final group member worked on training an AI model to detect obstacles in it's path to avoid while en route to a student. After all the pieces were fabricated, we began assembling the plane starting with the wings and then the fuselage while another group member set up our Raspberry Pi to be used with the AI trained with object detection. After assembling the front and back ends of the plane, the front back and fuselage were connected and wings attached on top, along with the motors meant to keep the plane airborne. The PCB meant to control the plane was coded afterwards and the plane was tested.
Challenges we ran into
A major challenge that was faced by one of our team members was getting the camera connected to the Raspberry Pi computer to work. This was the only computer we had that was small and powerful enough to run the bird detection AI to avoid collisions and fit on the plane. Luckily though, after hours of work he managed to find the problem and connect the camera, but we soon found out that the 32x raspberry pi operating system we were trying to integrate kept failing at installing the right dependencies for the Ultralytics library the YOLO object-recognition model depended on. Therefore, we switched into using the 64x version and through more time looking for workarounds we came to the conclusion that the operating system couldn't support our current camera model. We also ran into issues while CNCing the PCB board twice, during the first run of the machine during the drilling section it had somehow flipped where everything was meant to be and drilled holes in the wrong areas. During the second run of the machine, it had wiped out a trace while creating another trace, making it unusable. In the end, we used a perf board to construct our PCB for the remote since the CNC machine had proved to be too much of a hassle and no longer worth using since we no longer had the time to run it and do other tasks
Accomplishments that we're proud of
Because of fast CAD modeling and designs optimized for quick 3D printing, we were able to fabricate and construct the RC plane very quickly. In addition, none of us have had major experience with AI however our group member was able quickly start training an object recognition model based off the YOLO architecture (You Only Look Once) and had it optimized by the end of the competition. We're also proud of how sound the design came out to be, as the various parts we scavenged and put together came out as finished product we can proudly show you all!
What we learned
We all learned how to collaborate more efficiently and express our ideas properly to each person to be able to create our final product, as well as learning how to use our 3-d printers more efficiently by seeing how much we could bring the speed of the print up before it began negatively affecting the quality of our pieces.
What's next for Lockheed Martini
The next step would likely be to design a more rigid and permanent airframe, with a focus on durability and larger payload size. After that, integration with a GPS receiver would allow the plane to fly fully autonomously. We could also hang bright colored posters around campus to designate drop-off locations through the usage of our machine learning model for object recognition, and maybe at one point recognize gestures from people to drop it early. Finally, we could integrate everything into a mobile app and/or website that would allow for fellow students to order from, as well as pitch our idea to GMU.
Built With
- 3d-printing
- ai
- arduino
- autodesk-fusion-360
- c
- c++
- cnc-addiditve-manufacturing
- cnc-routing
- flatcam
- freecad
- kicad
- machine-learning
- object-detection
- raspberry-pi
- rf
- ultimaker-cura
- virtual-communication
- wireless-communication
- yolo












Log in or sign up for Devpost to join the conversation.