-
-
Picture 2
-
Picture
-
Picture 3



Inspiration
Definitely the pandemic played a huge role in providing us this idea . Especially for people who are highly affected by this virus and have to maintain social distance always . However , This basis of the project is versatile and can be modified to be of use in many instances. One such being the safety of the people who are visually impaired population. since the project gives a audio output it can be especially of use in notifying the visually impaired if someone or something is within a certain perimeter to them.
What it does
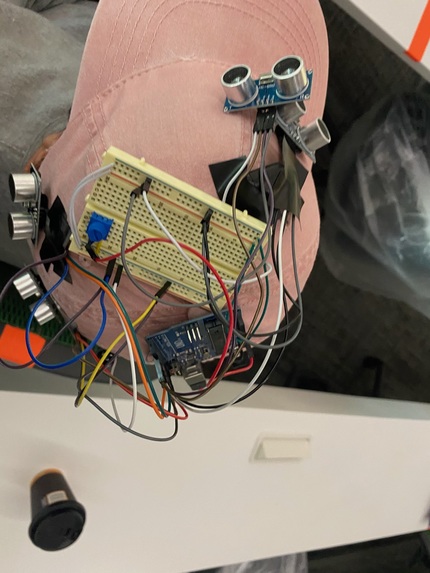
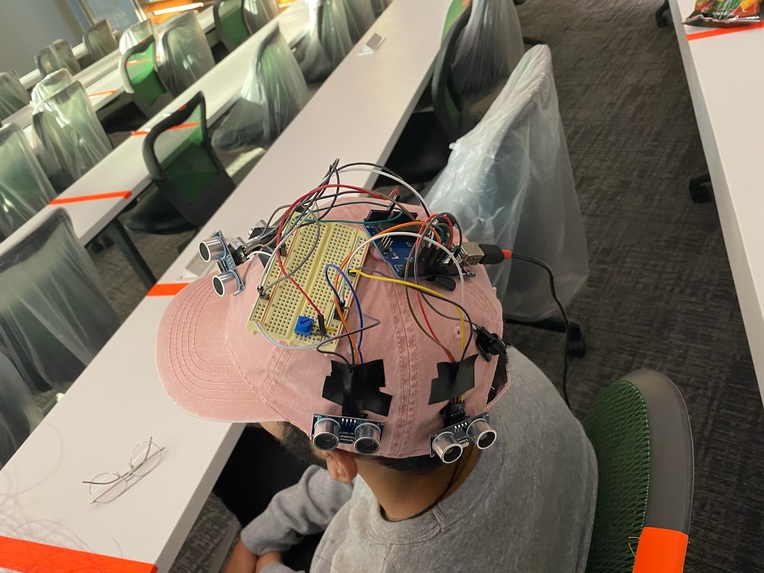
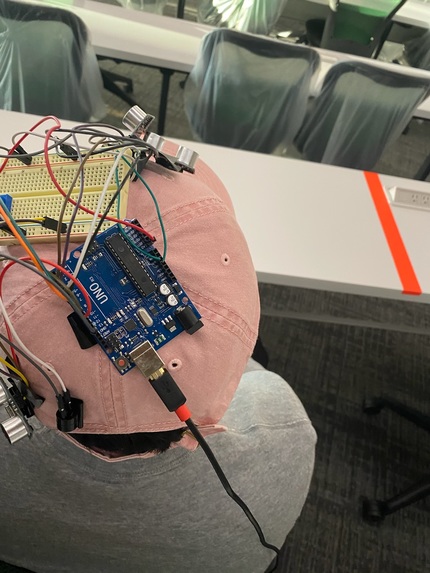
The "No Cap" (cap that indicates when someone enters the "no" zone)is a cap with built in ultrasonic sensor , that detect if a person/ object is within the proximity of 6 feet (the distance has been adjusted for testing and demonstration purposes), hence helping maintaining social distance the whole time . Along with the sensor there is a piezo which produces a small buzzer when someone walks closer than the boundary of 6 feet . We also incorporated a potentiometer to turn off the sounds without exiting the program. This is Helpful in situation such as surveillance in keeping track of all the distance maintained between external objects and the machine.
How we built it
Using every minute we had since the start of the hackathon , me and my teammates first made the hardware project which consisted of the arduino and the 4 sensors pointing to each direction . Along with that we connected the piezo , which would produce the sound . We then coded the arduino circuit. on day two of the Hackathon, we had the idea of incorporating a potentiometer to turn of sound while still collecting distance data. We then started working on a web app, the web app lets the user control their boundaries.
Challenges we ran into
we ran into a couple of issues from the beginning, Although we weren't able to solve every issue, we were able to find solutions to a few of our issues. One such being the volume of the piezo buzzer. We wanted a way of continuing to collect data while still being able to stop the buzzer sound. We were able to find a solution for this with the use of a potentiometer and analogRead function.
Another challenge we ran into was not being able to get our data from arduino c file to be used in a JS file. Although we couldn't implement our solution to this our research landed us in a solution which entailed writing the raw data into a text file and using the text file date to perform operations on the JS file.
Accomplishments that we're proud of
We are proud of how our hardware circuit works. Being CS and CE freshmen with no hand-on lab experience, we had quite a learning curve in understanding how to use an arduino, sensor and other components. However, By diving up tasks and learning individually and my transfering knowledge within our group we were all able to learn and successfully build our project. The completion of this has helped us gain experience which will allow us to go into future competition and projects with more ease and confidence.
What we learned
We learned how to make a project work between 2 programming languages, while we couldn't quite put it into practice we were learned a lot about tranffering data from a C program to be used in a JS program. This knowledge will help us reach out of our comfort zone and try new projects and implement new ideas in the future with data from an arduino based system of a c-platform system.
We also learned a lot about dividing up work and making a dynamic timeline to stay on trak while also allowing breaks for memebers of our team.
What's next for No Cap
No cap is a very base level project which can be used in many setting and scenarios. The raw data collected by the arduino can be used in machine learning function to potentially build automation that navigates through obstacles. on a shorter term timeline, our team would like to use the raw data to make a real-time visual feedback on the no-cap web app for the user.s essentially, The shortest recorded distance would be mapped on the app screen to allow end user to see how close or far away a person or object is. This will especially be useful in non social distance or remote operation scenarios where a end user cannot physically me near the hardware equipment, such as surveillance or unmanned manuvering automated vehicle.


Log in or sign up for Devpost to join the conversation.