-
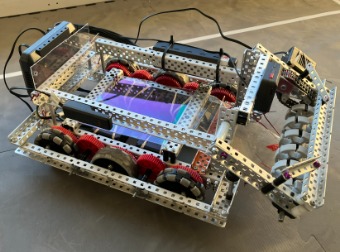
Prototype
-
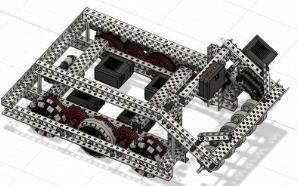
3d-Model


Our Thinking
The idea came from noticing in accessibility of tennis for those with mobility challenges. After practicing tennis, it would be hard for people with mobility challenges to go and pick up all the balls they had just hit. That's when we came up with Robofecther, a robot that autonomously picks up tennis balls, so people with mobility challenges could more easily practice and play tennis, increasing accesbility to the sport.
What We Learned
How to integrate sensors and motors into a working system. Basics of autonomous navigation and programming control loops. How to program in C++
How We Built It
Design: Sketched out the frame and mechanism for ball collection. Hardware: Assembled a chassis, motors, and a roller-based intake system. Software: Programmed logic for movement, detection, and collection. Testing: Ran trials on court, adjusting speed, angles, and ball detection.
Challenges Faced
Ensuring the robot could consistently grab balls of different positions and speeds. Balancing cost with performance since commercial robots are very expensive. Debugging hardware–software integration when motors and sensors didn’t sync.

Log in or sign up for Devpost to join the conversation.