-
-
-
System Design


Bridging Minds and Microcontrollers: An LLM-Powered Hardware Agent
What Inspired Us
Anyone who has worked with hardware like Arduino or Raspberry Pi or any other embedded systems knows the feeling. You have a brilliant idea—a robot arm that waves, a plant that tweets when it's thirsty, a custom game controller—but you're immediately bogged down in a sea of boilerplate code, cryptic library documentation, and frustrating debugging cycles. The distance between a creative idea and a blinking LED can feel immense.
We asked ourselves: What if we could command hardware as easily as we talk to a person?
The recent explosion in Large Language Models (LLMs) with tool-using capabilities presented a tantalizing possibility. These models can reason, plan, and translate human intent into structured API calls. We were inspired to build a bridge, a seamless interface between the fluid, creative world of human language and the rigid, logical world of microcontrollers. Our goal was to empower creators to focus on what they want to build, not the tedious specifics of how to code it.
What We Built
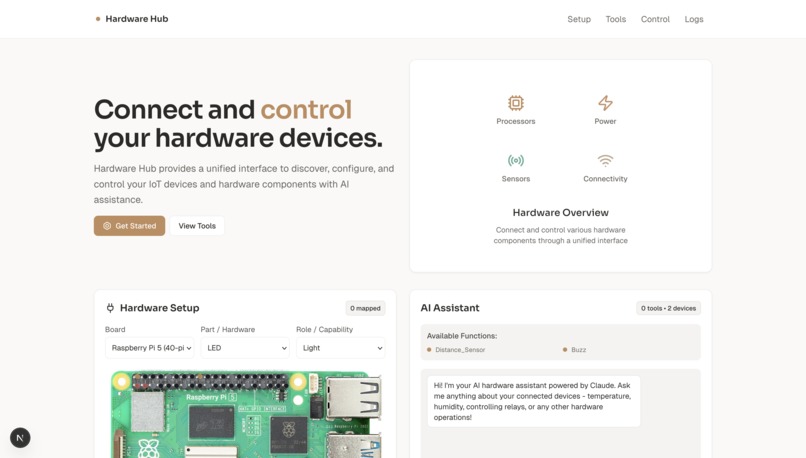
We created an application to generate custom instantly working code (not through llms but a design rigid structure/algo we made) for users & intelligent agent that allows a user to control physical hardware using natural language. The system is dynamic, automatically detecting the available hardware components and exposing them as "tools" to a powerful LLM, Claude.
Here’s how it works:
- Hardware Configuration: You start by telling our server which components are connected. This generates boilerplate code through our custom script to give users hardware to directly flash with no worry.
- Tool Discovery: The server dynamically enables a corresponding set of tools that the LLM can use.
- Natural Language Prompt: You give the agent a simple task in plain English. For example:
"Please beep 3 times if you detect someone" - Intelligent Action: Claude analyzes your request, examines the available tools, and decides on the best course of action. It understands that "beep" corresponds to the
piezo_beeptool and that "three times" means it needs to call it multiple times if it reads there is something from their_sensortool . - Execution: The agent calls the chosen tool with the correct parameters, and our system translates that into a serial command that the Arduino executes in the real world.
The result is a magical experience where your words have a direct, physical impact.
How We Built It:
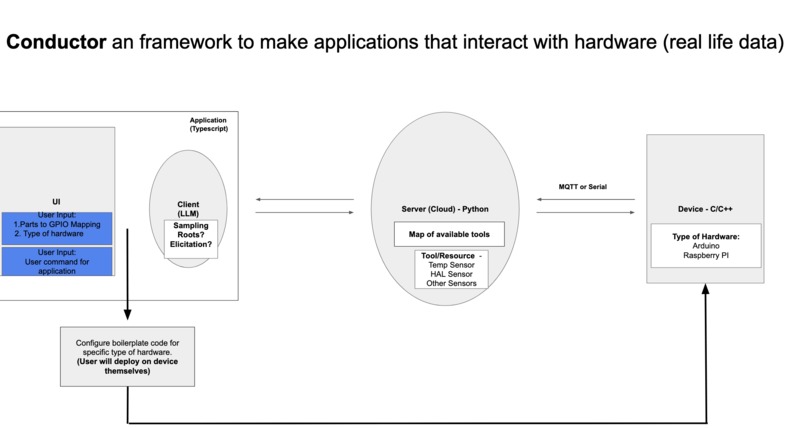
To bring this concept to life, we engineered a three-tiered architecture designed for modularity and resilience. Application Layer, a dynamic web interface built with Next.js, where the user can visually map physical hardware components to the pins of their microcontroller boards. This interactive dashboard allows for intuitive configuration of the hardware setup, defining which tool corresponds to which physical port. We are able to generate insta deployable code for the user to put on their device. Next we have the Agent Layer, where Anthropic's Claude model acts as the reasoning engine. This layer's sole job is to translate ambiguous natural language into precise, structured tool calls. The magic happens in the middle tier, our Hardware Abstraction Server, built with FastMCP. This server dynamically discovers which hardware components are connected and exposes them as a library of available tools to the LLM agent. Crucially, when the agent decides to execute a tool, like piezo_beep, the server doesn't block. Instead, it places the command onto an asynchronous, thread-safe Command Queue. This final layer handles the notoriously tricky business of serial communication, dispatching commands one by one to the Arduino, Raspberry PI, and other devices - managing responses, and ensuring that our high-level AI logic remains completely decoupled from the blocking, low-level reality of hardware interaction.
Challenges We Faced
We encountered a problem where our system would become unresponsive—essentially falling asleep—after a period of inactivity. Our software, blind to this physical state, would continue sending commands into the void, leading to timeouts and a complete desynchronization between the agent's understanding of the world and the hardware's actual state. To solve this, we had to engineer a more robust serial protocol with a "heartbeat" mechanism—a handshake that actively pings the device to confirm it's awake and ready before dispatching a critical command.
Furthermore, our asynchronous command queue introduced complex concurrency issues. We faced subtle race conditions where a rapid sequence of commands (e.g., "turn servo left, then right") could be dispatched faster than the Arduino could execute them. This could cause commands to be missed or executed out of order, leading to chaotic physical behavior. Debugging this required a deep dive into thread synchronization, implementing locking mechanisms and a confirmation-receipt system to ensure that each command was fully completed and acknowledged by the hardware before the next one was sent, guaranteeing that our agent's intentions were always faithfully executed in the correct sequence.
What We Learned
This project was a profound demonstration of how LLMs can serve as a powerful interface layer. They are uniquely capable of translating ambiguous human intent into the structured, precise data that machines require.
We also learned the immense value of architectural abstraction. By separating the agent, the server, and the serial communication, we could work on all three parts in parallel and create a system that was far more scalable and resilient.
Most importantly, we saw a glimpse of an exciting, "agentic" future. This project, while simple, is a microcosm of a new paradigm where interacting with complex systems—be it in robotics, home automation, or scientific research—becomes as intuitive as a conversation. We didn't just build a hardware controller; we built a new way to create.
Built With
- c
- css
- fastmcpcloud
- llm
- mcp
- python
- typescript


Log in or sign up for Devpost to join the conversation.