Embody the Future
以大规模人类数据为基础,致力于具身通用基础模型



Being-VL
了解更多

Being-H
了解更多
Being-M
了解更多

Being-W
了解更多


核心技术优势

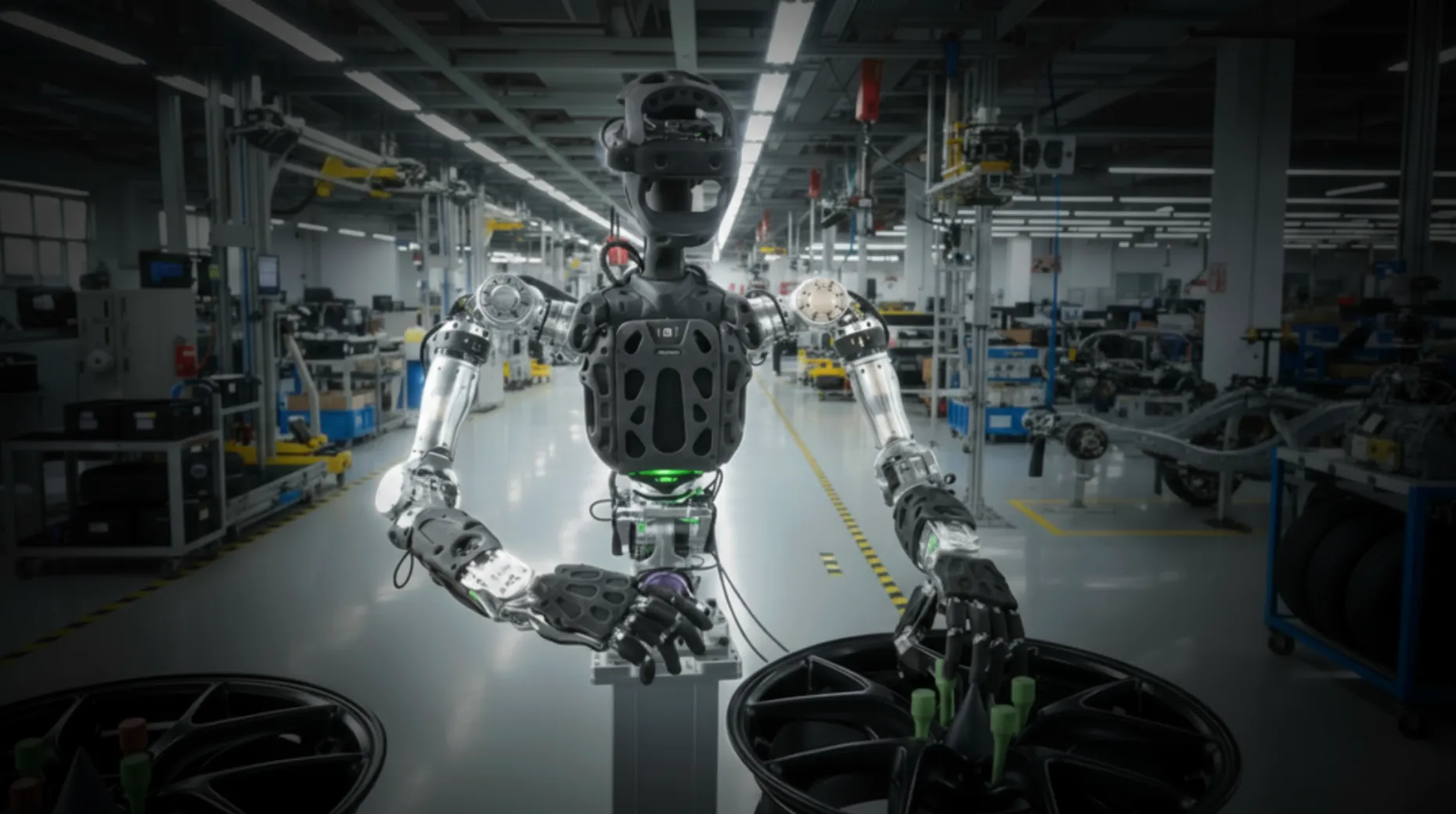
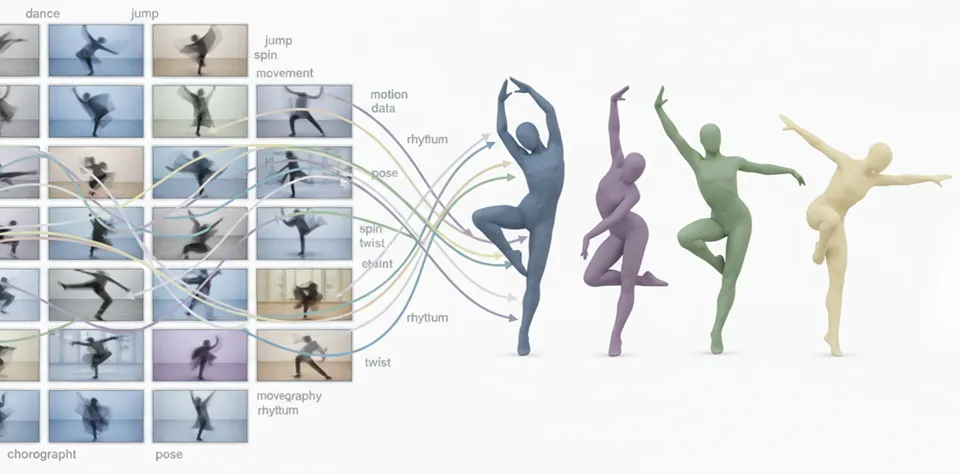
大规模低成本数据
人类数据来源于真实物理世界,规模大、获取容易,能以更低成本更有效地训练模型

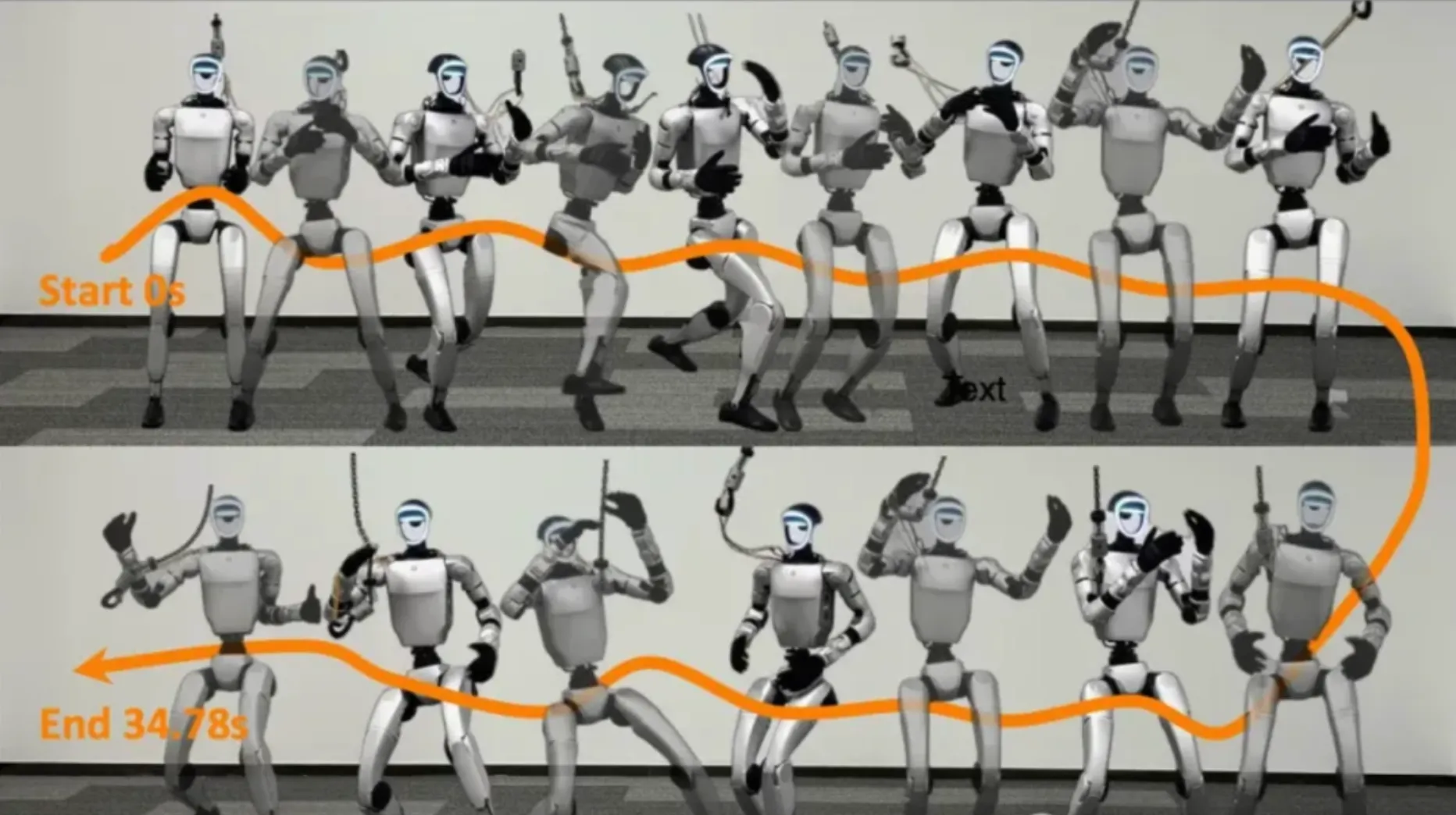
模型可跨本体泛化
基于人类数据预训练的模型可以天然向下兼容各种末端控制器、人形机器人本体,实现跨本体泛化

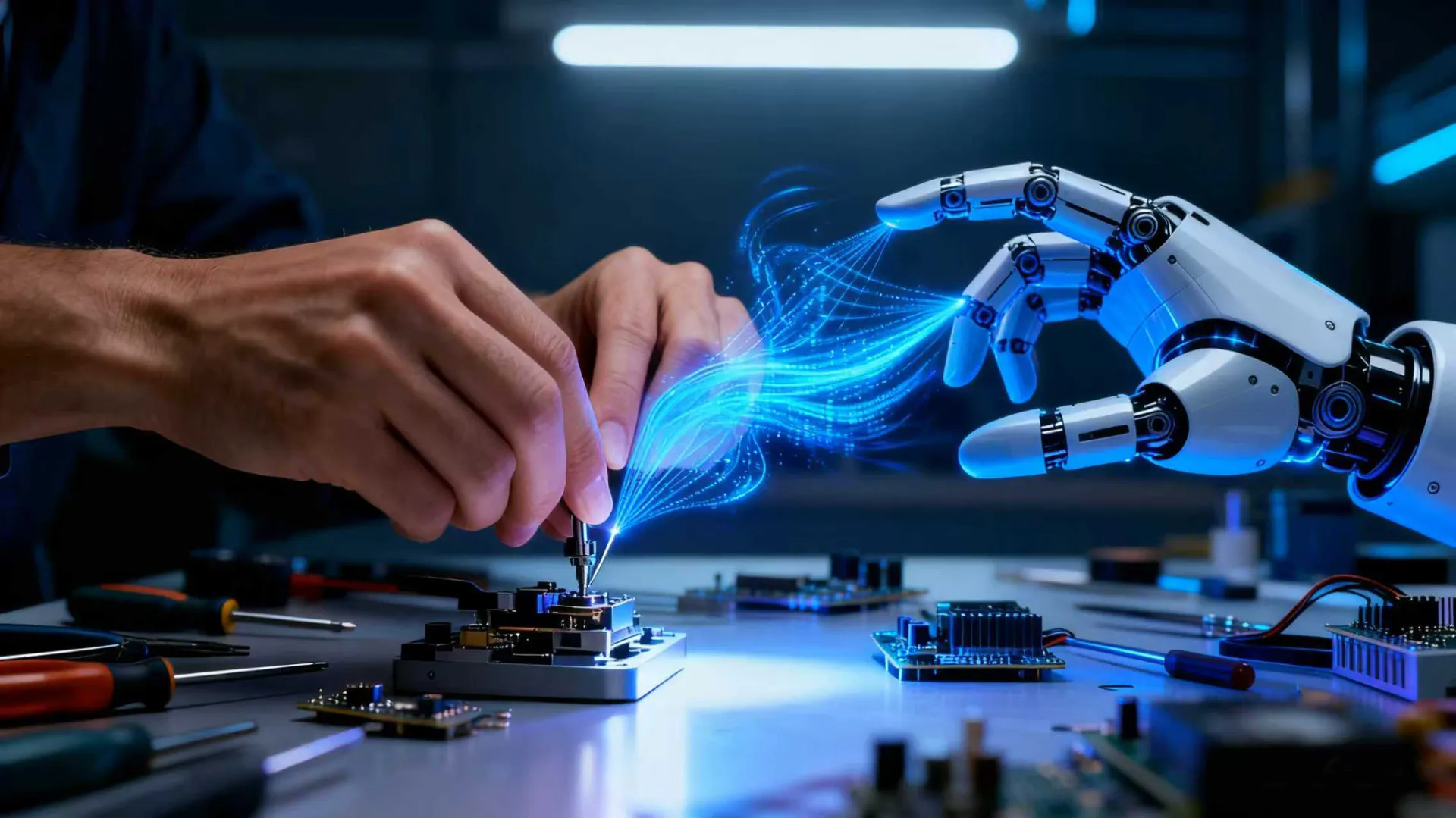
场景落地适配性强
搭载人类数据预训练模型的人形机器人可直接对现有人力需求进行替代,与人类生活工作的现实场景完全匹配

关于我们
我们是一家专注于人工智能技术研发的创新企业,致力于解决具身智能的核心技术难题,引领人形机器人技术革命

使命
使命

价值观
价值观
同心探索,同行创新,共成长

愿景
愿景











京公网安备11010802047405号