-
Exoskeleton joint model

Inspiration
We are currently limited to binary finger classification for our smart prosthetic hand, and require a better means of acquiring angular/positional finger data
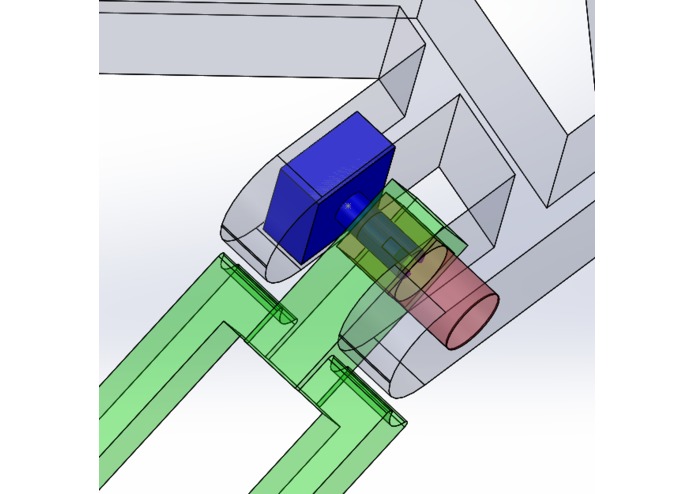
What it does
The device records voltages across potentiometers embedded in the joints of the exoskeleton, which correlates to the angle to which the finger has moved
How we built it
3D printing the mechanical model, use of novel voltage division, data is acquired and manipulated in Python
Challenges we ran into
We were unable to print the model today, and we had minor difficulties with the pin design for the exoskeleton joints
Accomplishments that we're proud of
Hypothesis seems to hold (so far), and we've made considerable progress on the 3D printable model and source code
What we learned
We have learned that this project is very viable, and will provide us with adequate input data to use
What's next for Project Starfish Exoskeleton
We will 3D print the model, integrate electronic components, and form a database of recorded angular data values

Log in or sign up for Devpost to join the conversation.