-
-

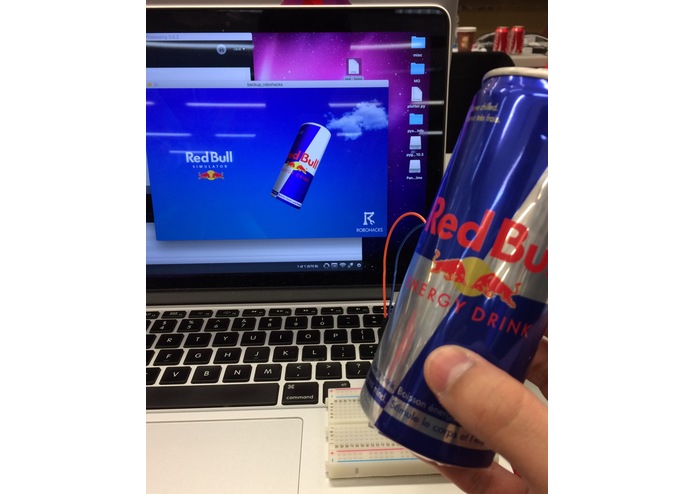
Screenshot of simulation
-
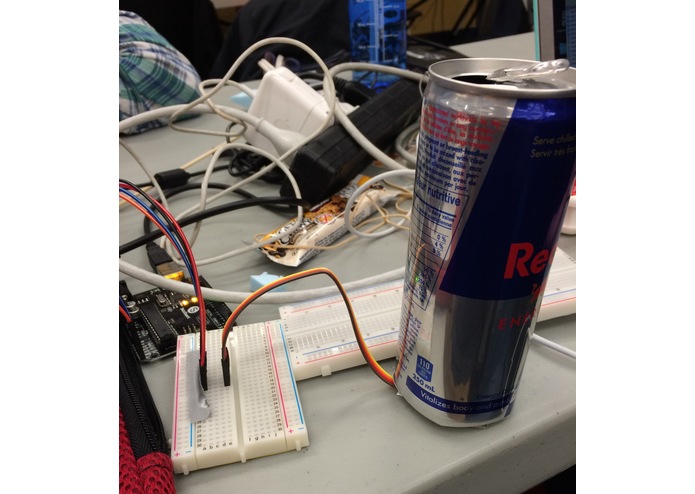



RedBullSimulator is an empty can of Red Bull with an AltIMU-10 v4 Gyroscope tucked inside. This device serially communicates the accelerometer/gyro measurements to an Arduino Uno via I2C. This data is captured by the Processing IDE (through USB) which interprets the data and displays a live simulation of the Red Bull's orientation in space (with textures and everything).
I was inspired to work on this project while I was trying to teach myself serial communication and interfacing the Arduino with the AltIMU sensor. At the time, I had already finished two energy drinks and it only seemed natural to work with what I had: an Arduino, empty cans and a sensor.
Azure: link
#include <Wire.h>
#include <LSM6.h>
LSM6 imu;
char report[80];
void setup()
{
Serial.begin(9600);
Wire.begin();
if (!imu.init())
{
Serial.println("Failed to detect and initialize IMU!");
while (1);
}
imu.enableDefault();
}
void loop()
{
imu.read();
snprintf(report, sizeof(report), "%6d,%6d,%6d,%6d,%6d,%6d",
imu.a.x, imu.a.y, imu.a.z,
imu.g.x, imu.g.y, imu.g.z);
Serial.println(report);
delay(50);
}
import processing.serial.* ;
Serial myPort;
String[] globalval;
String[] valX;
String[] valY;
String[] valR;
int i;
int j;
int k;
float val_intX;
float val_intY;
float val_intR;
float data1target = 0;
float data2target = 0;
float data3target = 0;
int vall;
float data1;
float data2;
float data3;
float val_tempX;
float val_tempY;
float val_tempR;
float x;
float y;
float r;
float targetX;
float targetY;
float targetR;
int data = 0;
int intensity = 250;
float xspeed;
float prevx;
float a;
float ease = 0.05;
int[] dataout;
float easing = 0.3;
//cylinder
int tubeRes = 32;
float[] tubeX = new float[tubeRes];
float[] tubeY = new float[tubeRes];
PImage img;
PImage imglid;
PShape lid;
PImage photo, maskImage;
//LID
int numParts = 80;
float diam = 100;
PImage bg;
void setup() {
myPort = new Serial(this, "/dev/tty.usbmodem1421", 9600);
//smooth();
size(800,500, P3D);
println(Serial.list());
img = loadImage("texture2.png");
imglid = loadImage("texture3.png");
float angle = 360.0 / tubeRes;
for (int k = 0; k < tubeRes; k++) {
tubeX[k] = cos(radians(k * angle));
tubeY[k] = sin(radians(k * angle));
}
noStroke();
photo = loadImage("masktex.jpg");
maskImage = loadImage("mask.jpg");
photo.mask(maskImage);
bg = loadImage("bg-hd-normal3.jpg");
background(bg);
}
void draw() {
globalval = split(myPort.readStringUntil('\n'), ',');
data1 = getMeasurementX(globalval);
data2 = getMeasurementY(globalval);
data3 = getMeasurementR(globalval);
//background(0);
background(bg);
directionalLight(150, 150, 150, 0, 0, -1);
pointLight(210, 210, 210, width/1.5, height/2, 500);
pointLight(255, 255, 255, 0, height/2, -500);
ambientLight(230, 230, 230);
shininess(25.0);
data1target += (data1 - data1target)*ease;
data2target += (data2 - data2target)*ease;
data3target += (data3 - data3target)*ease;
translate(width * 0.6, height / 2, 100);
specular(175, 175, 175);
rotateX(-radians((data1target)));
rotateZ(-radians((data2target)));
rotateY(PI*0.85 + radians((data3target)));
beginShape(QUAD_STRIP);
shininess(20.0);
texture(img);
for (int i = 0; i < tubeRes; i++) {
float x = tubeX[i] * 40;
float z = tubeY[i] * 40;
float u = img.width / tubeRes * i;
vertex(x, -100, z, u, 0);
vertex(x, 100, z, u, img.height);
}
endShape();
beginShape();
texture(photo);
specular(175, 175, 175);
float theta = TWO_PI / numParts+0.5;
for (int i=0; i<numParts; i++) {
float angle = theta * i;
float x = cos(angle);
float y = sin(angle);
vertex(x * diam, y * diam, (x+1)/2, (y+1)/2);
}
endShape();
//image(photo, 0, 0, 80, 80);
//rotateX(PI/2.0);
ellipseMode(RADIUS); // Set ellipseMode to RADIUS
translate(0, -100, 0);
fill(150);
rotateX(PI/2.0);
ellipse(0, 0, 40, 40);
ellipseMode(RADIUS); // Set ellipseMode to RADIUS
fill(30);
translate(0, 0, 0.1);
ellipse(0, 16, 13, 10);
ellipseMode(RADIUS); // Set ellipseMode to RADIUS
translate(0, 0, -201);
fill(40);
ellipse(0, 0, 40, 40);
}
float getMeasurementX(String[] rrr) {
valX = rrr;
if (valX != null) {
j = 0;
while (valX[2].charAt(j) == ' ') {
j++;
}
val_intX = float(valX[2].substring(j))/intensity;
val_tempX = val_intX;
} else {
val_intX = val_tempX;
}
return val_intX;
}
float getMeasurementY(String[] rrr) {
valY = rrr;
if (valY != null) {
i = 0;
while (valY[1].charAt(i) == ' ') {
i++;
}
val_intY = float(valY[1].substring(i))/intensity;
val_tempY = val_intY;
} else {
val_intY = val_tempY;
}
return val_intY;
}
float getMeasurementR(String[] rrr) {
valR = rrr;
if (valR != null) {
k = 0;
println(valR[3]);
while (valY[3].charAt(k) == ' ') {
k++;
}
val_intR = float(valR[3].substring(k))/intensity;
val_tempR = val_intR;
} else {
val_intR = val_tempR;
}
return val_intR;
}
Built With
- arduino-uno
- processing-ide
- red-bull

Log in or sign up for Devpost to join the conversation.