Hello everyone! Welcome back to another deep dive into my Flight Controller architecture. When designing hardware for high-performance Drone Racing, we often obsess over MCU clock speeds or gyro update rates. But there is a hidden enemy to stable flight that many designers overlook: Temperature changes.
Today, I am going to walk you through the On-Board Heater Circuit in my schematic, explaining why it exists, how the hardware works, and how the software controls it.
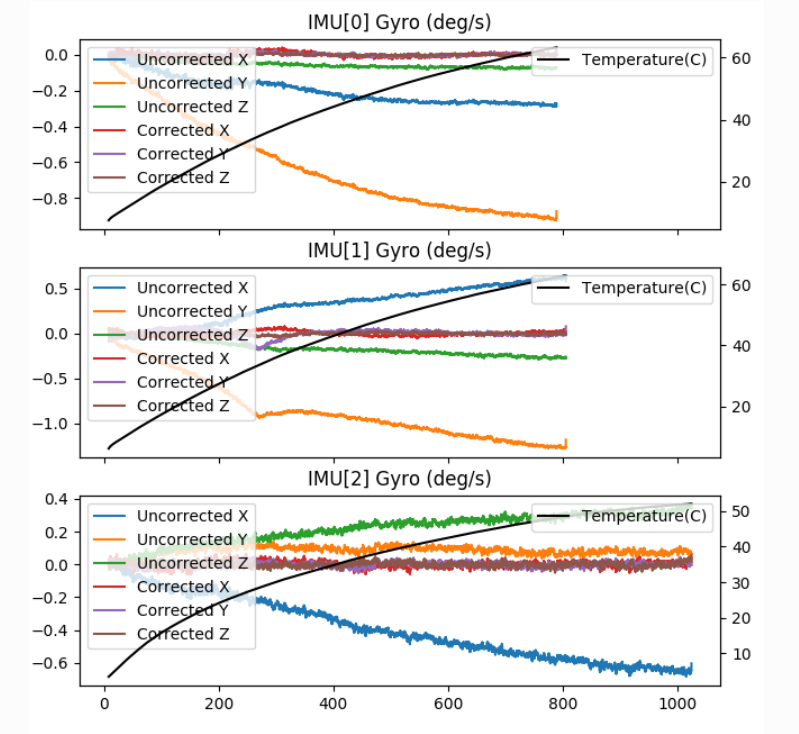
The Invisible Enemy: Thermal Drift
Inside your flight controller's IMU (Inertial Measurement Unit), there are microscopic mechanical structures. As your drone flies, the ambient temperature changes. As the temperature of the silicon changes, these microscopic structures expand or contract, causing the zero-point of your gyro and accelerometer to shift. This is called Thermal Drift.
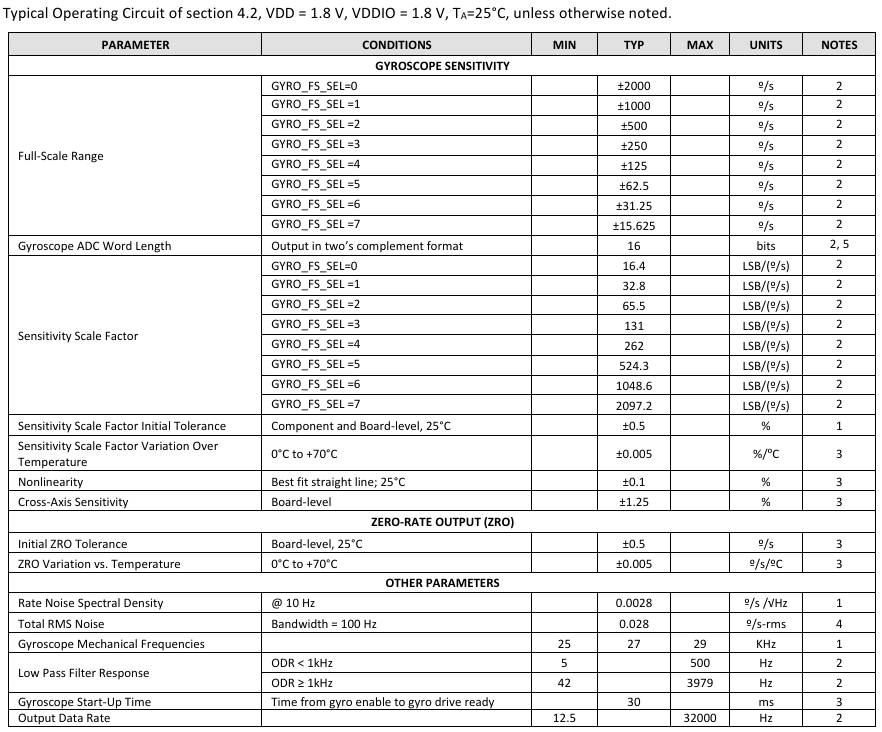
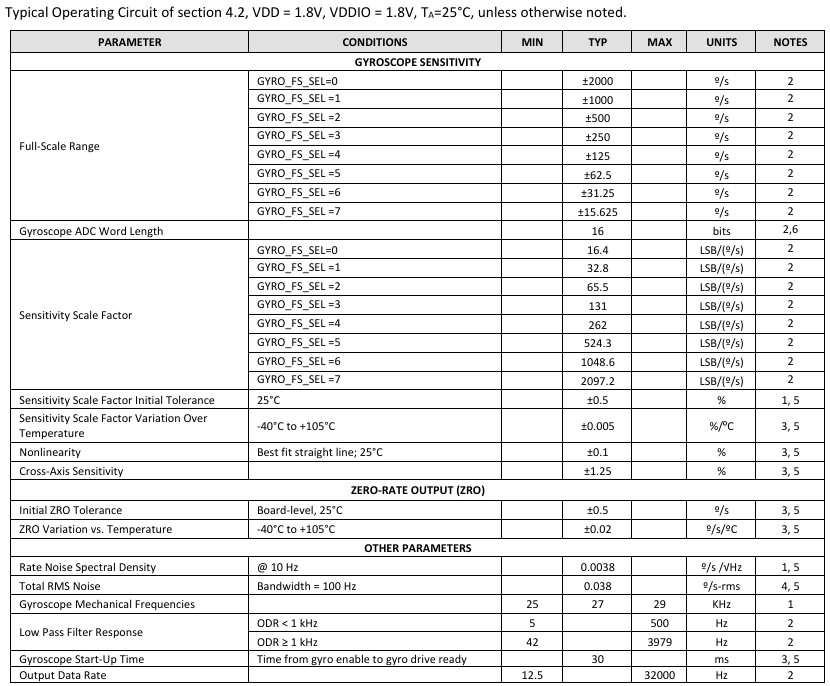
For the my Flight Controller, I am utilizing high-end IMUs like the ICM-42688-P and the industrial-grade IIM-42652. If you look at the ICM-42688-P datasheet on the Gyroscope Specifications table, you will see that the Gyro Offset Temp Stability is +/- 5 mdps/C. Meanwhile, the IIM-42652 datasheet specifies a wide operating range of -40C to +105C with exceptional temperature stability.
This Figure shown the Gyroscope Specification table from ICM-42688-P to show you the exact "Gyro Offset Temp Stability" row
For the IIM-42652, this image shown on page 11 highlights its robust temperature rating (+105 deg C)
If your flight controller thinks it is rotating just because the IMU got colder, your drone will drift in the air, ruining your racing line.
HEATER Circuit
To solve this, we artificially heat the IMUs to a constant temperature (usually around 45C to 60C) so that the silicon never experiences temperature swings.
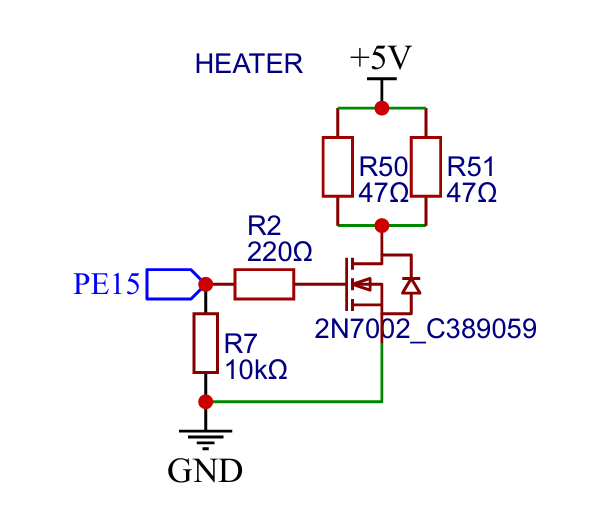
Here is the "HEATER 5V" section from my Flight Controller schematic. This image shows the MOSFET and the resistor array highlighted).
1. The Heating Elements
To generate heat, I am using standard SMD resistors. When current passes through a resistor, it dissipates power as heat (P = I^2 x R). By placing multiple resistors closely grouped around the ICM-42688-P and IIM-42652 on the PCB, we create a thermal footprint.
2. The Switching Mechanism (MOSFET)
We cannot just hook the resistors directly to the 5V line, or they would heat up continuously. We need a switch. In my schematic, I use an N-Channel MOSFET.
The Gate of this MOSFET is connected to a PWM-capable pin on the Main MCU. When the MCU applies a HIGH signal, the MOSFET turns on, allowing current to flow from the 5V rail, through the resistors, and into GND.
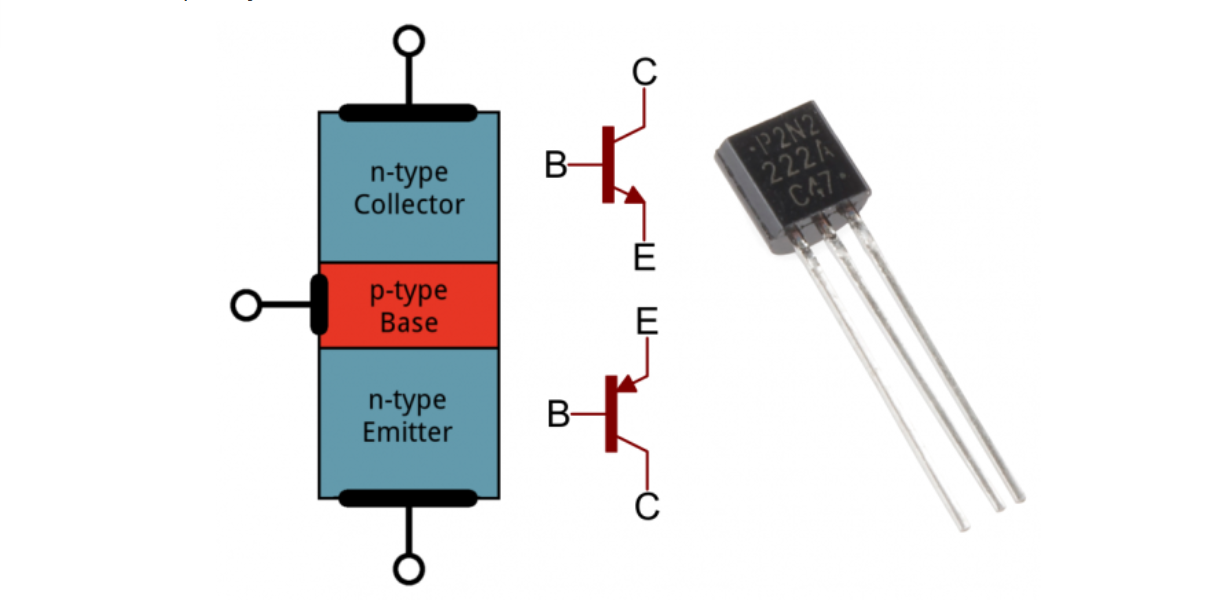
If you want a great refresher on how MOSFETs act as solid-state switches in circuits like this, you can check on this website: SparkFun's Tutorial on Transistors. They have a fantastic interactive diagram in the "Applications: Switches" section.
Drop a comment below if you want me to do a separate post on how to calculate the exact power dissipation and choose the right wattage rating for your SMD heating resistors!
PID Temperature Control
Hardware is only half the battle. How does the flight controller know when to turn the heater on? Both the ICM-42688-P and IIM-42652 have internal temperature sensors. The MCU reads this temperature via the SPI bus. Firmware like ArduPilot or Betaflight takes this temperature reading and feeds it into a dedicated PID loop specifically for the heater.
If the IMU is too cold, the MCU increases the PWM duty cycle to the MOSFET Gate, pushing more current through the resistors. If the IMU reaches the target, the MCU lowers the PWM duty cycle.
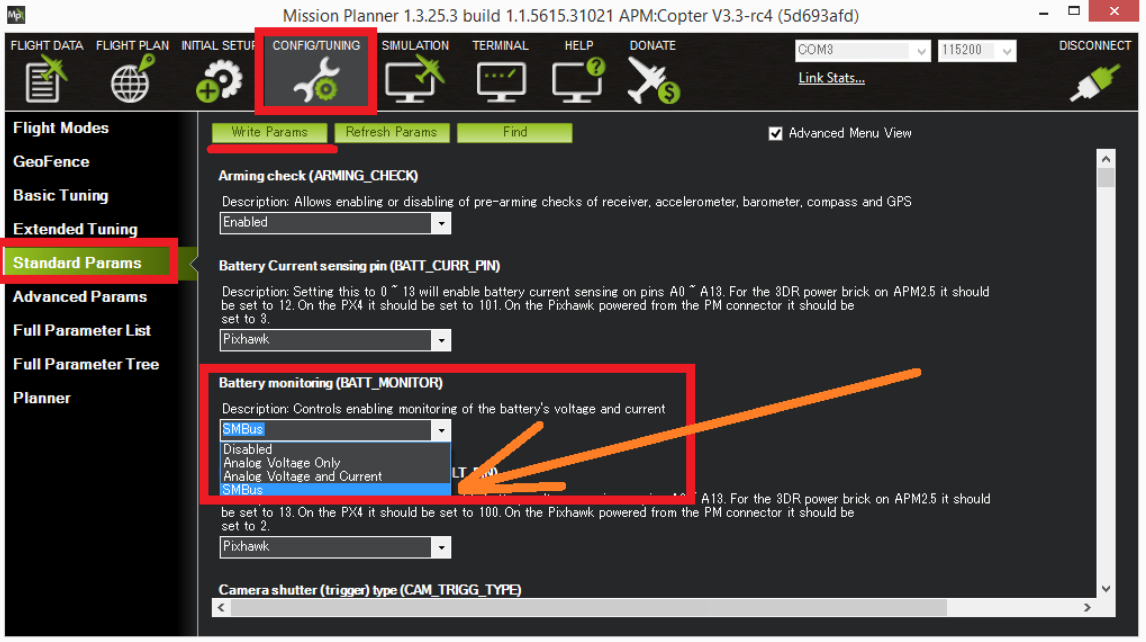
This Image shown the target temperature configuration parameters directly from Ardupilot IMU Temperature Calibration. This image shows exactly what the user sees when configuring the heater.
Conclusion
By integrating a simple N-Channel MOSFET and a few strategically placed resistors, the flight controller actively fights thermal drift at the hardware level. This ensures that the data from our ICM-42688-P and IIM-42652 is rock-solid.