![]()
An ongoing open-source hardware and software project for building sonar systems for testing, boating, bathymetry, and research.
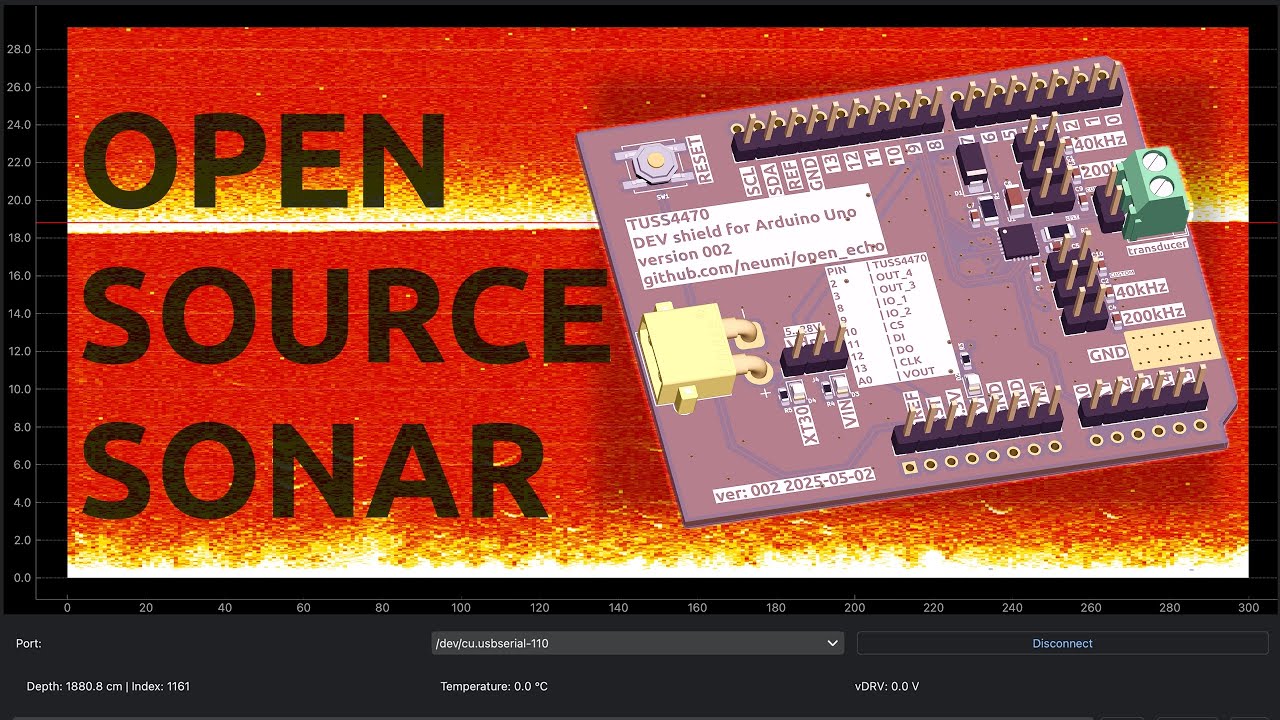
The most commonly used hardware is the TUSS4470 Arduino Shield, which stacks on top of an Arduino Uno to drive the TUSS4470 ultrasonic driver.
The board can run the RAW Data Firmware to operate a wide variety of ultrasonic transducers, covering frequencies from 40 kHz up to 1000 kHz in different media such as air or water.
The NMEA Output Firmware can read depth data from commercially available in-water ultrasonic transducers (e.g., on boats) and output NMEA0183-compatible data to a computer or a UART-connected device such as a Pixhawk or other controllers.
Open Echo has been tested on multiple ultrasonic transducers and is compatible with all of them—from car parking sensors to Lowrance Tripleshot side-scan transducers.
The Python Interface Software connects to Open Echo boards running the RAW Data Firmware. It can display raw echo data, change configurations, output a TCP depth data stream, and more.
Check the Getting Started Guide!
If something is unclear or you find a bug, please open an issue.
Raw Data Waterfall chart in the Python Desktop software:

If you need the hardware, you can order it using the Hardware Files from a board + SMT house (JLC recommended).
They can also be bought as a complete and tested set direclty from Elecrow: https://www.elecrow.com/open-echo-tuss4470-development-shield.html
If they’re out of stock, or if you’d prefer to order them within Germany to reduce shipping costs, please send me an email at: [email protected]
All profits go directly toward supporting and advancing the Open Echo project!
If you don't order the boards directly from me or Elecrow, please be aware that I can't provide support.

This project is currently in development. The TUSS4470 Development Shield is ready for external use!
Development is ongoing—check the documentation and Discord channel for the latest updates.
Want to stay updated or participate? Join the Discord!
Check the Getting Started Guide.
An accessible Open Source SONAR stack for development, research and real use:
- Open Source SONAR technology for differernt use cases
- support for a variety of commercial or DIY transducers in water and air
- relatively simple hardware that can be ordered from a board house
- easy entry for less experienced users
- community for exchange and development
- development of more advanced SONAR applications
- Universal TUSS4470-based Arduino shield for testing ultrasonic transducers
- Python interface software for raw data visualization, configuration, and TCP data output
- Tested depth range of at least 50 m in water
- NMEA0183 compatible (DBT data output to other devices)
- New all-in-one boards with STM32, TUSS4470, and boost converter currently in development
- picoW implementation in development (already successfull)
- UDP network RAW data transfer from picoW to Python interface running
The new (May 2025) TUSS4470 Arduino Shield supports transducers from 40 kHz to 1000 kHz. It can drive them, receive echoes, filter signals, and send raw echo data to the Python backend.
Driver voltage can be supplied from Arduino VIN or via the external XT30 connector. With an MT3608 boost converter, USB can be used as a power supply and boosted to the desired drive voltage (manual soldering required).
The TUSS4470 Arduino Shield is and will remain the main development board for this project. It is an excellent platform for testing and development.
It can drive a wide range of transducers at different voltages, but it is limited by RAM size and sampling speed. You can capture 1800 samples at 12 microseconds per sample (~18 m range in water) with 8-bit resolution. For longer ranges, you can add a delay to capture echoes from more distant objects.
This makes it a perfect board for learning, testing, and prototyping. Most software development is done using this board.
For special use cases, additional boards and software are under development. Check the development folder for development work.
Firmware examples are available in each project folder.
The Open Echo Interface Software allows you to control Open Echo boards, view live data, and adjust board settings.
Live echogram in water on Python software (6x speed):

Tested using a built-in 150 kHz SEAFARER transducer, powered at 15-20 V via an MT3608 boost converter from USB. In the plots, data capture begins at the bottom.
 38 m range test |
 Kiel Channel sand and mud |
 Slope near Stollergrund |
 Stones and sandy seabed |
 Fish detection |
 Multiple reflections and seaweed |
https://www.youtube.com/watch?v=R3_NO2F7PsI
https://www.youtube.com/watch?v=msbLVsY8xhQ
https://www.youtube.com/watch?v=eJ8jVEQSx_Y
https://www.youtube.com/watch?v=Bxh3rWd5RZk
https://www.youtube.com/watch?v=UDYWQIizN7A
https://www.rapp-instruments.de/RemoteSensing/Roves/sidescan/sidescan.htm
https://www.youtube.com/watch?v=ZtUkt8Q4EJE
| Transducer Name | Ranking | Description | Frequency | Range Air/Water | Price | Link |
|---|---|---|---|---|---|---|
| NASA / Seafarer 150kHz Echo Sounder | ⭐ ⭐ ⭐ | NASA in-hull boat transducer for echo sounding and simple fish-finding | 150kHz | >2m/>50m | 50-100€ | https://www.nasamarine.com/product/depth-transducer-with-7-metre-cable/7 |
| Raymarine CPT-S | ⭐ ⭐ ⭐ | High quality In-hull transducer with two frequencies | 50 + 200kHz | 2m/>50m | 200€ | https://www.raymarine.com/de-de/unsere-produkte/fischfinder-und-sonarmodule/fischfindergeber/cpt-s-durchbruchgeber |
| Lowrance Tripleshot Sidescan | ⭐ ⭐ ⭐ | Sidescan transducer with three FANS + temperature + down-scan | 200 + 455 + 600kHz | 0m/>20m | 200€ | https://www.echolotzentrum.de/shop/lowrance-tripleshot-heckgeber/ |
| Cheap Bathymetry 200kHz | ⭐ ⭐ ⭐ | good range, good price/performance, hard to order | 200kHz | 2m/>30m | 25€ | https://www.alibaba.com/product-detail/Range-customization-lakes-river-surveys-no_1600829423846.html |
| Cheap Car Parking Sensor | ⭐ ⭐ | Great for air, also works in water (not recommended) | 40kHz | >7m/>30m | 5€ | https://de.aliexpress.com/item/1005006546490802.html |
| Water flow sensor transducer | ⭐ ⭐ | Cheap and works in Air and Water. Very narrow beam in Water (about 5°)! | 1000kHz | 0.25m/>10m | 16€ for 5pcs | https://de.aliexpress.com/item/32818381566.html |
| Only for air 200 kHz | ⭐ | has a sinter glass matching layer, should only be used in air | 200kHz | 0.8m/(>8m) | 10€ | https://de.aliexpress.com/item/1005006007865920.html |
| Different Encapsualated Transducers | ⭐ | Can be used for short range testing at higher frequencies | 200,300,400kHz | ?m/?m | 9-18€ | https://de.aliexpress.com/item/4000389134890.html |
| Very small PZT only | ⭐ | Only for testing / experimentation | 200kHz | 0.2m/?m | 10€ | https://de.aliexpress.com/item/1005007032482539.html |
Note
The range values were measured using the TUSS4470 shield and Arduino Uno with an MT3608 boost converter set to 20 V for vDRV, so consider them approximate.
Tip
As a general rule of thumb, lower frequencies propagate farther, while higher frequencies produce narrower beams and more detailed echoes.
If you need a transducer for bathymetry, choose one of the first four options. Most commercial marine-grade (boating) transducers are also suitable, as long as they operate in the 40-200 kHz range.
Check this Cheap Yellow Display implementation out: https://github.com/matztam/open_echo_cyd_display
And all the great stuff JohnCHarrington contributed: https://github.com/JohnCHarrington/open_echo