Drive the Shield-Bot
Navigation Modes
- On the remote, push Power, then push 1, 2 or 3 to select a navigation mode.
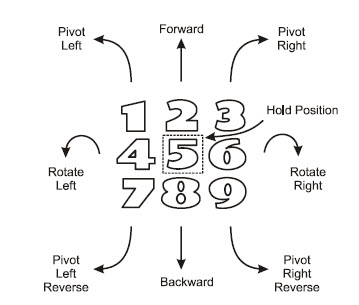
Power-1: Remote control
In this mode, use buttons 1-9 to drive the robot in different directions. Note that the sketch still uses the IR emitter/receiver pairs to check for an obstacle in front. If you try to drive your Shield-Bot into a wall, it won’t let you. Smart robot!
]
Power-2: Autonomous IR Roaming
In this mode, the Shield-Bot uses its IR emitter/receiver pairs to roam autonomously and avoid obstacles.
Power-3: Follow the Leader
In this mode, the Shield-Bot uses its IR emitter/receiver pairs to maintain a set distance from a stationary or moving object in front of it. The robot will follow your hand or another robot.