-
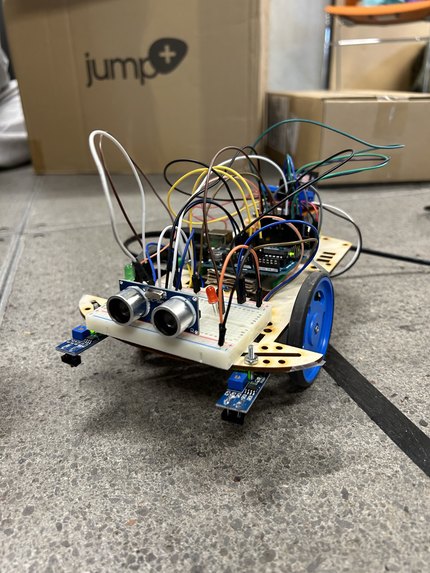
The front view of the CAAAMel Bot.
-
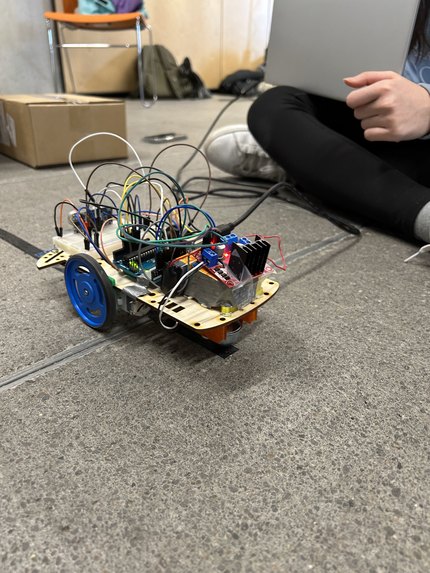
The CAAAMel, on the run.


Inspiration
The challenge was given at the hackathon, and we endeavoured to complete all the tasks posted.
What it does
The bot will follow black lines by correcting its path, turn 90 degrees at the detection of an obstacle, and drive straight forward without interruption.
How we built it
We began by following a number of tutorials on the motor driver, light sensors and ultrasonic distance sensor. These components were attached with wires through the breadboard and to the batteries. Then, once the system was cohesive, we disassembled it and stuck/screwed each piece to the laser-cut wood board. The drivetrain was our next focus - and once we had figured out the provided 3D printed parts were meant to be assembled, it came together relatively quickly. Our process continued through three hours of grueling re-wiring until we had a robot that could finally drive straight. The rest of the time was spent calibrating the sensors, which we had to move from underneath the robot to in front due to the shadow of the robot interfering with the detection. The ultrasonic distance sensor was also tested and functioned correctly.
Challenges we ran into
We ran into a number of issues over the course of the project. At first, we had difficulty sourcing wires and screws to assemble our robot correctly, and had trouble accessing the fabrication facility to use screwdrivers. To address this, we assembled a lot of our robot using ducttape, and hand-tightened all of the screws when possible. Due to our inexperience with the motor driver, we couldn't figure out how to wire it correctly with the PWM control. This cost us around two and a half hours of back and forth. During that time, the wires also kept falling off the motors, and we had to get it resoldered twice. Then, the motors were running at different speeds, causing the robot to drive in a curved path when it should've been straight. This issue plagued us for an hour until it miraculously went away, likely due to some re-wiring and readjusting the cover on the wheel. This was not the end of our challenges. When we went to attach the sensors, we found that the light sensors couldn't differentiate between the grey concrete floor (textured, with darker areas) and the black lines they were supposed to detect. Our solution was to attach LEDs that would light up to indicate when a sensor went off to help diagnose the problem. Then, we moved the sensors to the front of the robot from underneath so that the detection area could get more light and therefore better contrast. This helped to some extent. However, the robot still required a lot of calibration for each sensor. The biggest challenge was the unreliability of the batteries and some provided components. We lost hours to trying to test faulty buttons, and thinking the problem was elsewhere when it was actually a dead battery.
Accomplishments that we're proud of
As first year students, we came into the hackathon with very little understanding of the hardware, and gained a lot of knowledge about Arduino and circuitry. With our robot, we ran into many challenges which were further amplified due to our inexperience, and yet we managed to build a bot that can drive and do basic line detection.
What we learned
We learned about all the components in the kit and how to wire the connections between them. Through workshops, we explored how exactly the hardware is supposed to work, and applied those principles to our own bot. We also got first-hand experience in being patient, sticking with it, and how careful you have to be not to jostle a wire and have to spend the next hour trying to diagnose the problem.
What's next for CAAAMel
Next is to keep learning, keep building, and keep attending hackathon like this one to build more advanced, interesting robots in the future!

Log in or sign up for Devpost to join the conversation.