-

-
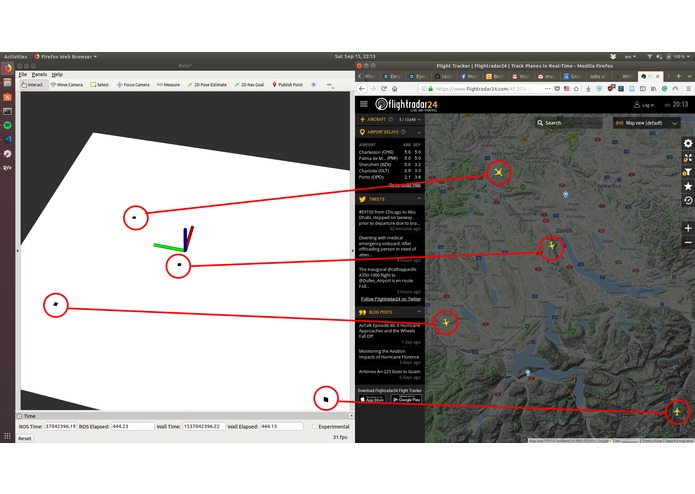
Real-time mapping
-
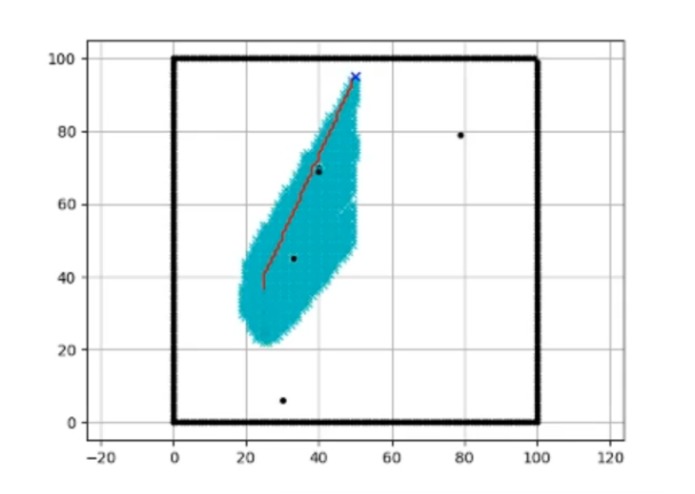
Fast planning
-
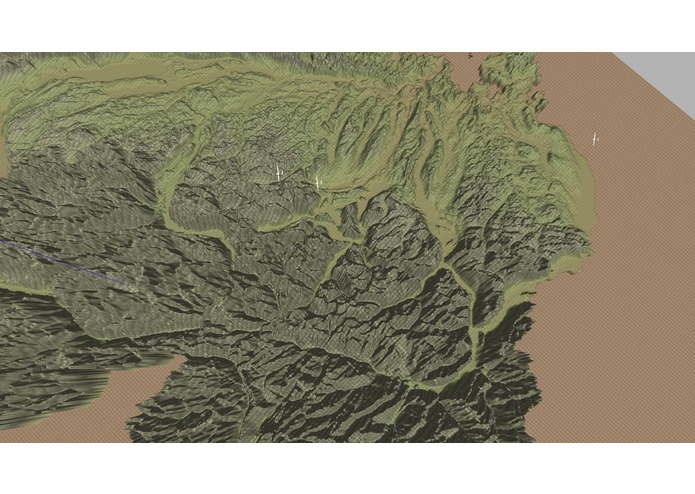
Realistic Simulations




Inspiration
Drones are becoming more common, challenging an already crowded airspace. If exciting businesses such as aerial taxi services or package drone delivery are to succeed they need a fast and robust autonomy stack. Operating detached from complicated airspace structures, drones need to move fast, yet agile in order to not interfere with state-of-the-art aerial traffic. As ETH robotics student and hobby pilot, we believe the time is now to make full use of the sky.
What it does
We take full use of Involi's real-time aircraft traffic monitoring system to create a massive realtime map of the skies above Switzerland. We plan optimal trajectories for autonomous aircraft, while avoiding dynamic obstacles in dense airspaces. With the Swisscom Appcloud and our mobile app, we further put the user in the front seat to enjoy the pilot's view.
How we built it
Seamlessly integrated Involi's real-time aircraft traffic monitoring system, we run optimal path planning with collision avoidance by using the famous A* algorithm. Employing ROS and open source Simulator, we set up a physical simulation based on real hardware and physics. The result is additionally visualized using a first person perspective.
Challenges we ran into
- With increasing complexity, the Interfacing of different workspaces and programming languages becomes more and more challenging
- Airplanes disappearing behind mountains
Accomplishments that we're proud of
- State-of-the-art 3D Simulations
- Applying A* to dynamic obstacles
- Pushing human frontiers with bleeding-edge technologies
- High tenacity and not falling asleeẄEFJÄEFNSÜNnnëroinjvI
What we learned
- The importance of hydration
- Deeper understanding of various tools and frameworks (for some)
What's next for luft-taxi
- Include surging and plunging for collision avoidance
- Scale to multi agent planning and control
- More accurate Model of the Drone(s)
- Industrialization, then retire




Log in or sign up for Devpost to join the conversation.