-
The process of creating the Robocar

Inspiration
We wanted to build a hands-on robotics project that combines movement and sensing. The idea was to create a smart Arduino car that could do more than just drive, it could recognize objects and respond to its environment.
What it does
Our Arduino car can move around autonomously, detect different colors, and pick up small objects using a mechanical arm. It uses sensors to navigate and make decisions in real time.
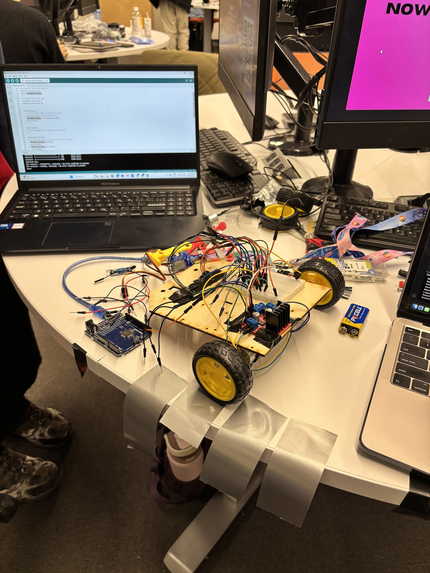
How we built it using an Arduino
We built the system using an Arduino microcontroller as the brain of the car. Motors control movement, sensors handle color detection and object sensing, and a custom-designed arm allows the car to grab items. All components were programmed in Arduino IDE using C-based code.
Challenges we ran into a lot
We faced difficulties with motor control, sensor accuracy, and coordinating multiple components at the same time. Debugging wiring issues and timing in the code took a lot of trial and error.
Accomplishments
One of our biggest accomplishments was successfully programming the motors to achieving accurate motion control, allowing the car to move forward, backward, and turn smoothly. We are also proud that all of our sensors work together effectively to detect colour, lines and obstacles. Integrating these systems allowed the car to navigate its environment and stay on track.
What we learned
We learned how to program an Arduino, interface sensors and motors, troubleshoot hardware issues, and design mechanical systems. This project also taught us problem-solving, patience, and teamwork.
What's next for Robocar
Next, we want to improve object detection accuracy, make the car faster and smoother. Our goal is to keep upgrading the system.

Log in or sign up for Devpost to join the conversation.