-
-
-
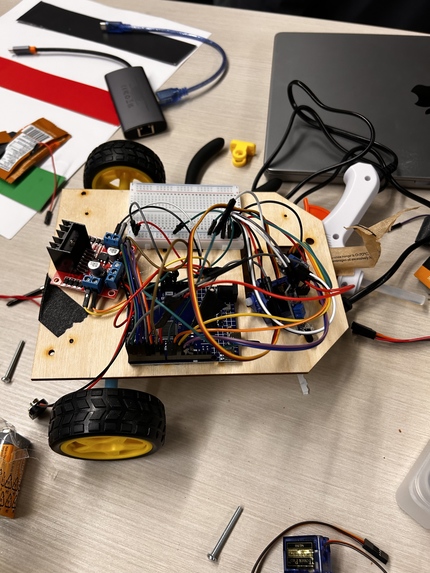
This figure shows our assembly of the hardwares and mechanical components.
-
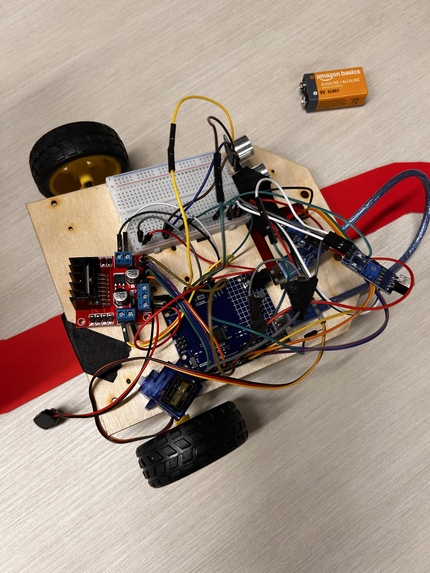
This figure is taken while we are testing if it can be on the track properly.



Inspiration
Our team was inspired by the dual nature of the Biathlon—a Winter Olympic event that demands both the high-speed endurance of cross-country skiing and the intense precision of target shooting. We wanted to explore how these conflicting requirements translate into robotics: the need for a system that is agile enough to navigate a winding obstacle course yet stable enough to execute a precise projectile launch. The challenge of integrating "perception, reasoning, and actuation" into a single autonomous agent drove us to build a robot that captures the spirit of these snow-based disciplines.
What it does
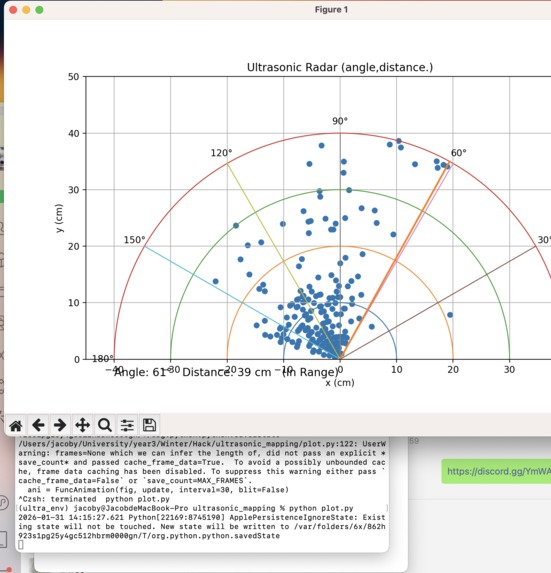
Our robot is an autonomous rover designed to navigate a Winter Olympics-style course. Its run begins by using a servo-driven claw to pick up a battery box and transport it to a specific drop-off zone to "unlock" the track. Using a Color Sensor, the robot makes real-time decisions to split between two distinct paths: The Red Path (Obstacle Course): The robot utilizes ultrasonic sensors to detect and avoid black obstructions while navigating sharp turns and winding tracks to demonstrate agility. The Green Path (Target Shooting): The robot climbs a ramp (curved or straight) and positions itself at a firing line. It then identifies the target center using color cues and launches a projectile into the "black zone" (16cm width) for maximum points.
How we built it
We utilized the core components of the Hacker Kit to create a unified mechatronics system: Mechanical Design: We constructed a differential drive chassis using the provided laser-cut base and two DC motors for locomotion. For the manipulator, we designed a 2-DOF arm using two servo motors—one for the joint and one for the claw—allowing us to securely grip and lift the battery boxes. Electronics & Sensing: The system is powered by an Arduino Uno, which processes data from multiple sensory inputs. We used an Ultrasonic Sensor for obstacle distance measuring and IR/Color Sensors for line tracking and zone identification (distinguishing between the blue drop-off zones and the red/green path indicators). Control Logic: The robot operates on a state machine architecture. We implemented a PID-like control loop to correct the robot's heading based on IR sensor feedback, ensuring it stays centered on the track lines.
Challenges we ran into
One of the biggest technical hurdles was sensor calibration. The lighting conditions affected the Color Sensor's readings, making it difficult to reliably distinguish between the "Blue" (battery drop) and "Purple" (re-upload) zones. We had to implement a robust filtering algorithm to average the sensor readings $R_{avg} = \frac{1}{n}\sum_{i=1}^{n} R_i$ to prevent false positives. Additionally, mechanical instability in the shooting mechanism initially caused the ball to veer off-target; we solved this by reinforcing the firing arm with extra joint connectors to ensure a linear trajectory.
Accomplishments that we're proud of
We are most proud of the manipulation system. Successfully coding the servos to grab the box, hold it while traversing a ramp, and release it exactly in the target square was a significant milestone. We are also proud of hitting the "Black Zone" on the target, which required precise alignment logic to center the robot within the 9cm rings.
What we learned
This project deepened our understanding of system integration. We learned that mechanical design and software cannot be treated separately; the friction of the wheels affects the PID constants in the code, and the weight distribution of the battery pack impacts the robot's ability to climb the curved ramp. We also gained practical experience in power management, ensuring our 9V batteries could sustain both the DC motors and the servo load throughout the 5-minute run.
What's next for Utra-Hack
For the next iteration, we plan to improve the computer vision aspect. While the color sensor worked, upgrading to a camera module would allow for shape detection, enabling the robot to identify the target or obstacles from a greater distance. We also aim to optimize the gear ratios on the motors to complete the obstacle course well under the 60-second bonus threshold.



Log in or sign up for Devpost to join the conversation.