Pouring popcorn. Folding a shirt. Stacking blocks. The manipulation demos at #ICRA2026 were genuinely better this year.
But the hard part was never the demo. It's doing the same task 500 times, unsupervised, in a room nobody arranged in advance.
We can draw these lines because we run the whole loop: collect the data, train and evaluate models on it, feed what we learn back in.
Better data takes a human willing to hold it to a standard. That's the difference between training a robot and filling a hard drive.
The rubric. Pass/fail: the task matches the prompt, actions stay separable, no struggling, no mistakes that undo past work. Scored on a sliding scale: speed, smoothness, diversity, completion.
It's the same pattern behind the language models you use every day. Their quality traces back to people scoring what's good and what isn't. Robotics is no different.
Everything past it is judgment. Software can't tell you whether the hand fumbled the grasp or the run undid its own work. Validators can. They're the human scoring layer that decides whether a demonstration is training-grade.
First, a definition. Robotics data is egocentric task video from a bimanual embodiment, with enough sensor data to reconstruct its physical state at all times. Software enforces that floor automatically.
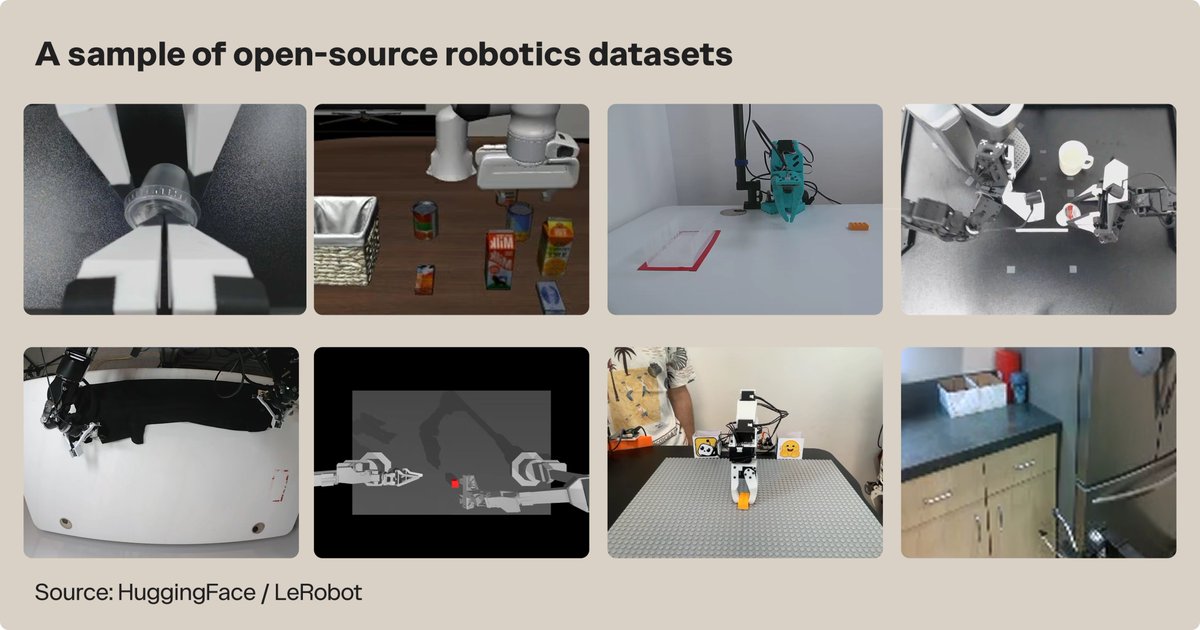
Most robotics data isn't worth training on. The open corpus is a melting pot: video, mocap, and teleoperation all sold as "robotics data," at wildly different quality.
Two runs of the same task. One trains a capable model. The other quietly degrades it. It's full of errors the model would just learn to copy.
Separating the two is what our Standards for Data are for.
Will Ohio be the centerfold of the robot mecha revolution?
@castorhat and Dane argue that the future of robotics might not be in SF or Boston. It might be wherever warehouse space is cheap 👇