some news: I’ve joined OpenAI.
After wrapping up my PhD in Robotics, I’m excited to keep working toward AGI in the physical world.
exciting journey ahead :)
Tesla
- collects 4.3M hours of driving data
- every day
- for free
- to train a 2DoF system (steering + throttle).
- yet full autonomy remains unsolved.
Frontier robotics startups/labs
- collect or purchase 0.01M–1M hours of data
- every X month
- for millions of dollars
- to
🚀 Can we make a humanoid move like Cristiano Ronaldo, LeBron James and Kobe Byrant?
YES!
🤖 Introducing ASAP: Aligning Simulation and Real-World Physics for Learning Agile Humanoid Whole-Body Skills
Website: agile.human2humanoid.com
Code: github.com/LeCAR-Lab/ASAP
🤖 Humanoids are expected to be the ultimate embodiment for general-purpose robots, but reaching that potential means adapting to diverse tasks—navigation, tabletop manipulation, loco-manipulation—each needing unique control modes.
🤔 Can one controller handle it all?
✨
🤖 Introducing H2O (Human2HumanOid):
- 🧠 An RL-based human-to-humanoid real-time whole-body teleoperation framework
- 💃 Scalable retargeting and training using large human motion dataset
- 🎥 With just an RGB camera, everyone can teleoperate a full-sized humanoid to perform
Introduce OmniH2O, a learning-based system for whole-body humanoid teleop and autonomy:
🦾Robust loco-mani policy
🦸Universal teleop interface: VR, verbal, RGB
🧠Autonomy via @ChatGPT4o or imitation
🔗Release the first whole-body humanoid dataset
omni.human2humanoid.com
I just improved the open-sourced ASAP code (github.com/LeCAR-Lab/ASAP) with a training command to replicate Cristiano Ronaldo’s iconic "Siuuu" jump in just 2 hours on two RTX 4090 GPUs!
Now, your humanoid can pull off elite athletic moves—give it a try! ⚽🤖🔥
🚀 Can we make a humanoid move like Cristiano Ronaldo, LeBron James and Kobe Byrant?
YES!
🤖 Introducing ASAP: Aligning Simulation and Real-World Physics for Learning Agile Humanoid Whole-Body Skills
Website: agile.human2humanoid.com
Code: github.com/LeCAR-Lab/ASAP
Success! 🍎🤖 I can now control Unitree robots on a Mac Mini M4 running macOS with a simple tweak! The unitree_sdk2_python (github.com/unitreerobotic…) thread implementation isn’t essential—getting the DDS subscriber and publisher to work is enough. I replaced Unitree’s Linux thread
Spent 4 hours trying to control Unitree Robots with a Mac Mini M4, but failed 😅. Here's what I tried and learned:
1. Linux on Mac Mini: Tried Asahi Linux, but M4 chips aren't supported yet. Stick to M1/M2 if you need Linux on Mac Mini.
2. Using macOS with Unitree SDK: SDK’s
🚀 ASAP is now FULLY open-source! 🚀
✅ Humanoid RL motion tracking & delta actions
✅ Motion retargeting to any humanoid
✅ ASAP Benchmark motions + pretrained policies
✅ Sim2Sim & Sim2Real ready — run ASAP in sim or on your G1 robot!
🔗 github.com/LeCAR-Lab/ASAP
Two weeks ago I passed my PhD thesis proposal 🎉 Huge thanks to my advisors @GuanyaShi & @ChangliuL, my committee, and everyone who has helped me along the way.
Last week I also gave a talk at UPenn GRASP on our 2-year journey in humanoid sim2real—reflections, lessons, and
I just joined NVIDIA GEAR group this week for my internship. What a place with so many exciting mission-driven research going on!
I will focus on control and sim2real of Gr00t project. If you are interested in joining us to build generalist embodied agent, please contact
I'm going to CVPR next week! My main goal is to build the world's best team for embodied AGI. We prioritize candidates in one of the domains:
1) Large-scale multimodal LLM and generative model training.
2) Deep robotics expertise: physics simulation, sim2real, and/or robot
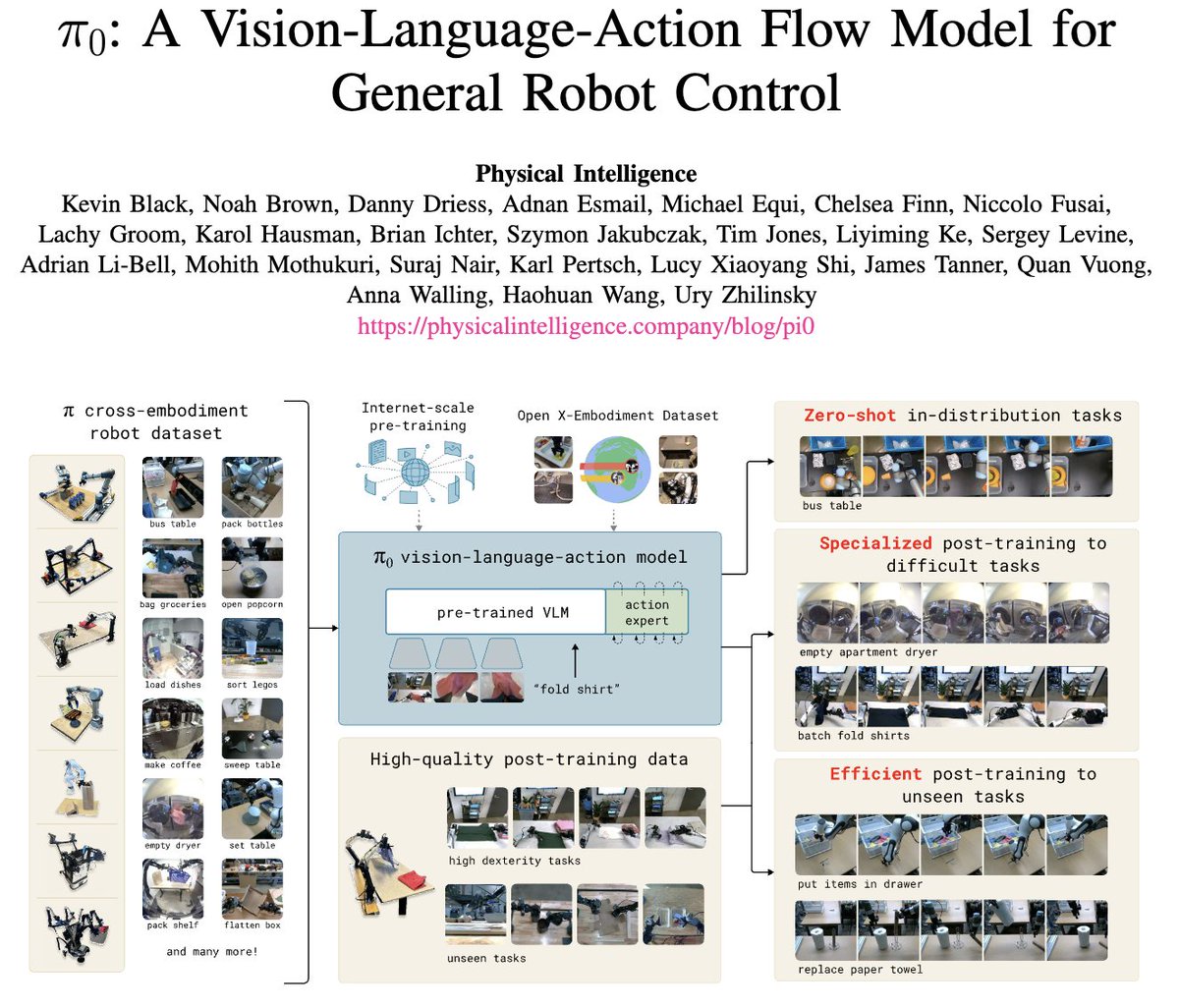
Really excited to share what I've been working on with my colleagues at Physical Intelligence! We've developed a prototype robotic foundation model that can fold laundry, assemble a box, bus a table, and many other things. We've written a paper and blog post about it. 🧵👇