I was preparing a video to introduce our lab @IRVLUTD for a meeting. Happy to share the video here!
We are looking forward to collaborating with both academia and industry. Please feel free to reach out
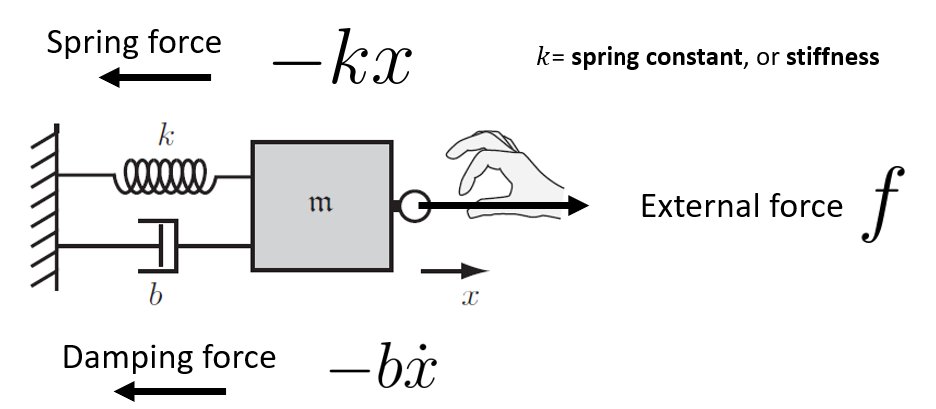
When I started learning robotics, I was lost in terms like stiffness, damping, and feedback control.
These slides on the overview of robot control can help you understand what they really mean #Roboticsyuxng.github.io/Courses/CS6341…
“As a PHD student, your job is not publishing a paper every quarter. Focus on a problem in deep understanding and solve it in years under the protect of your adviser” from @RussTedrake#RSS2025
Introducing DINOv3: a state-of-the-art computer vision model trained with self-supervised learning (SSL) that produces powerful, high-resolution image features. For the first time, a single frozen vision backbone outperforms specialized solutions on multiple long-standing dense
If you don't understand homogeneous transformation matrices, you won't understand robotics🤖. These slides will help you get it yuxng.github.io/Courses/CS6341…
Finished my robotics course this semester. If you want to learn some basics in robotics (configuration space, rigid-body motion, kinematics, dynamics, motion planning and control), feel free to check it out: labs.utdallas.edu/irvl/courses/f… Homework is designed to learn ROS programming
The trend in robot manipulation is to collect data and learn end-to-end policies. Do we still need perception or state estimation?
My analogy is how Tesla and Waymo are building self-driving cars. The car can understand the 3D world around it. Robots need to have this capability
This is a big claim by saying "handle/generalize to any household item".
It also highlights that we need some benchmarks for robotics. Unlike all the LLMs that are evaluated and compared on benchmarks, robotics is simply showing demos without numbers
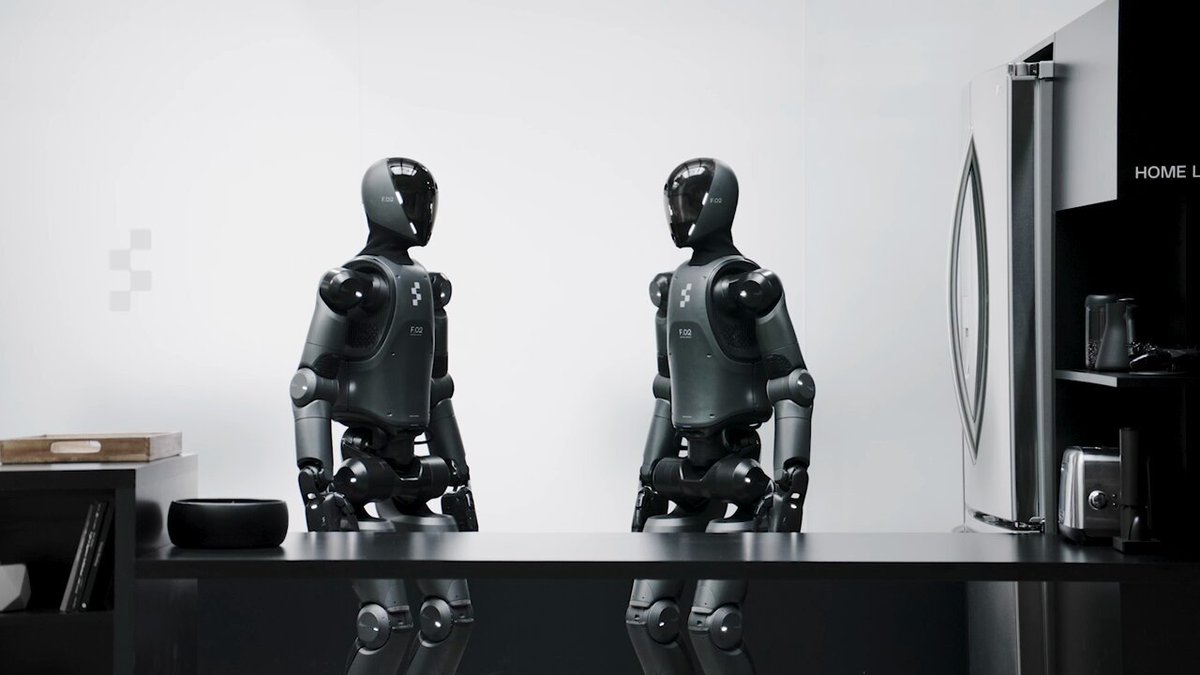
Meet Helix, our in-house AI that reasons like a human
Robotics won't get to the home without a step change in capabilities
Our robots can now handle virtually any household item:
today, we’re open sourcing the largest egocentric dataset in history.
- 10,000 hours
- 2,153 factory workers
- 1,080,000,000 frames
the era of data scaling in robotics is here. (thread)
This deserves more attention!
A real-world benchmark with 30 tasks across 4 robotic platforms, designed to evaluate VLA models.
Each task includes 1,000 demos for finetuning.
VLAs still have a long way to go. 🤖📊
(1/N)🚨How well does embodied intelligence perform in the real physical world? We are thrilled to introduce RoboChallenge co-initiated by @Dexmal_AI and @huggingface : the first large scale real-robot-based benchmark platform of embodied intelligence.
A general research tip: pay attention to the details. When something strange happens—don’t ignore it. Especially in robotics, odd or incorrect robot behavior often reveals deeper insights. Dig in and ask why